- website: grausam
- local copy: NUMPDE.pdf
- script: https://people.math.ethz.ch/~grsam/NUMPDEFL/NUMPDE.pdf
- exercises: grausam/NPDEFL_Problems.pdf
- local copy: NPDEFL_Problems.pdf
- exercise repository: https://gitlab.math.ethz.ch/ralfh/NPDERepo
- cpp reference: https://en.cppreference.com/
- lehrfm: GitHub / doxygen
- eigen documentation: https://eigen.tuxfamily.org/
- exam
-
- chapter 1+2 (mainly)
-
- chapter Stokes + Navier (?)
-
- practice classes:
- midterm: probably none
- endterm: probably none
Exercises
-> FS2026_tasks
Week 1 (16.02.-20.02.): 4 h 45 min
Week 2 (23.02.-27.02.): 6 h 45 min
-
- solution for h): 20260226_NumPDE_1.2)h)
Week 3 (02.03.-06.03.): 7 h 5 min
Week 4 (09.03.-13.03.): 5 h 45 min
Week 5 (16.03.-20.03.): 7 h 5 min
Week 6 (23.03.-27.03.): 5 h 50 min
Videos
- week (16.02.-20.02.):
- week (23.02.-27.02.):
- week (02.03.-06.03):
- week (09.03.-13.03):
- week (16.03.-20.03):
- week (23.03.-27.03.):
- week (30.03.-03.04.):
- week (13.04.-17.04.):
- week (20.04.-24.04.):
- week (27.04.-01.05.):
- week (04.05.-08.05.):
- week (11.05.-15.05.):
- week (18.05.-22.05.):
- week (25.05.-29.05.): no videos
Q&A
#timestamp 2026-03-20
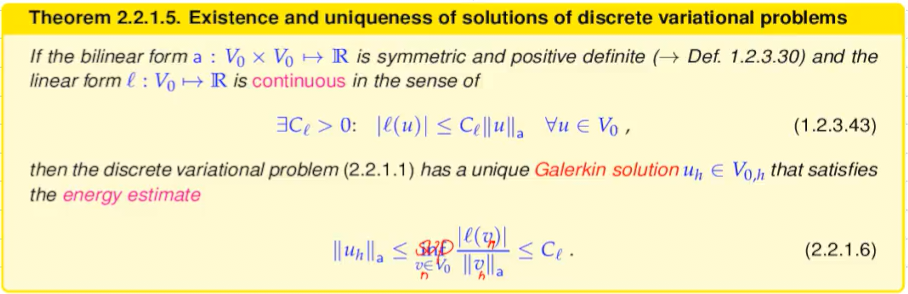
bilinear form is coercive
- continuity / boundedness:
- coercivity:
from this comes the Poincare inequality and uniform positive definite property
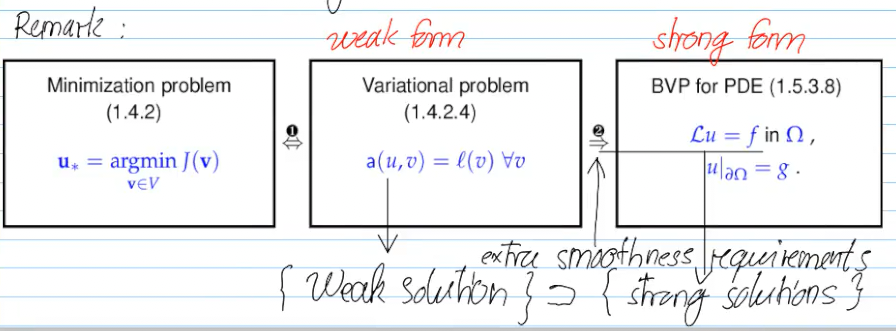
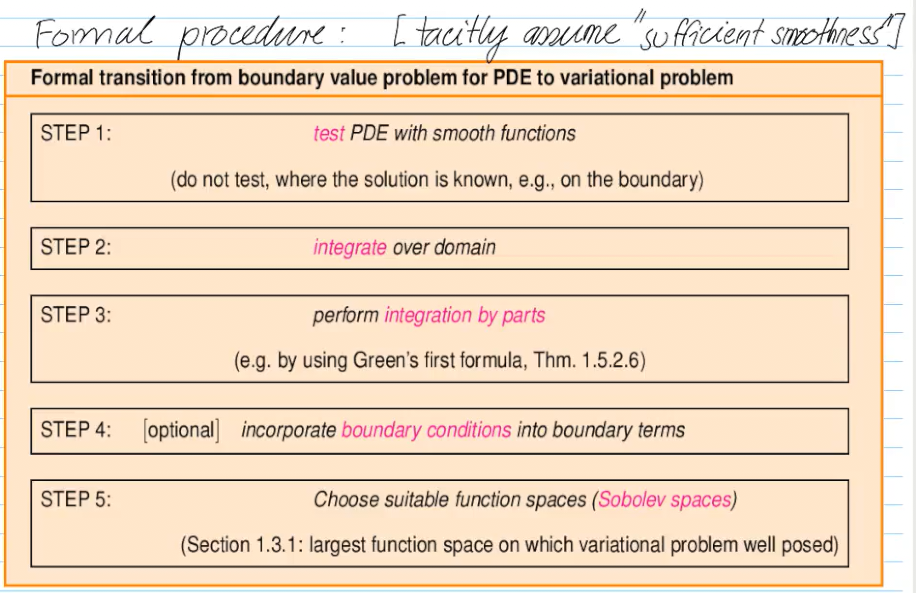
- (simplify strong form, then) convert to weak form
- choose suitable test function
- e.g.
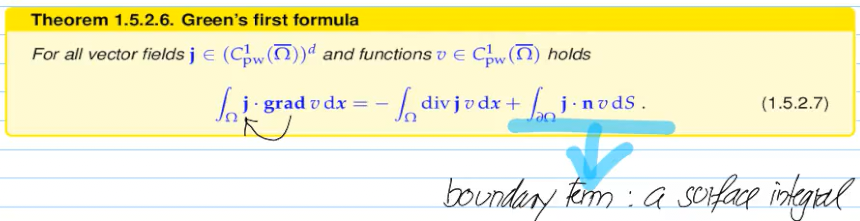
- IBP (use Green's formula)
- Incorporate b.c. (if needed)
- for Dirichlet (essential) -> nothing to do
- choose suitable fct. space
- minimal suitable fct. space (often
) - here, we need at list one derivative for
Vorlesung
1. Second-Order Scalar Elliptic Boundary Value Problems
Video 1.2.1: Elastic Membranes
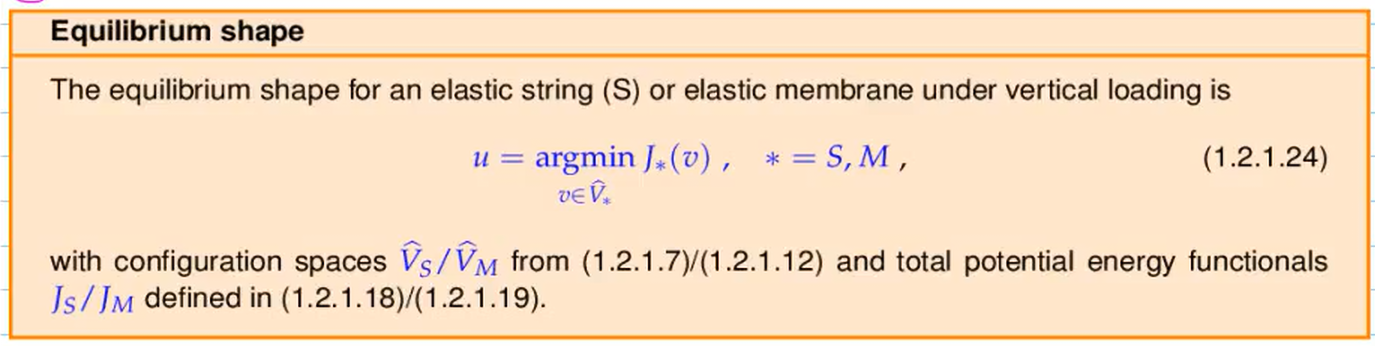
Goal: compute shape of string (1D)/membrane (2D) under vertical loading
The configuration space of a mathematical model is a set, each of whose elements completely describe all relevant aspects of a state of the modeled physical system.
- string must be continuous
string not ripped apart - b.c.: u(a),u(b) given
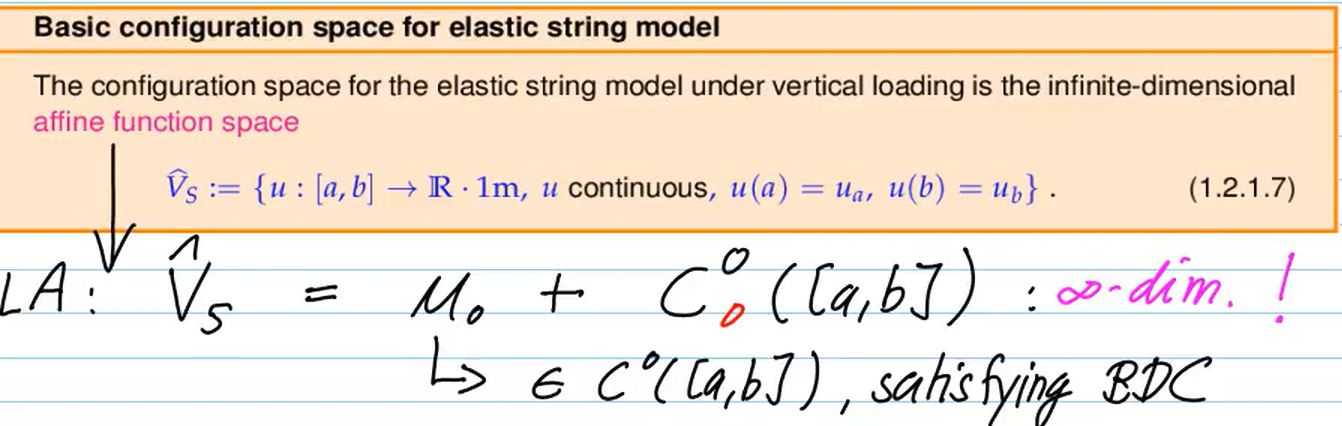


-> but need formula for potential energy
Video 1.2.2 Eloectrostatic Fields (6min)
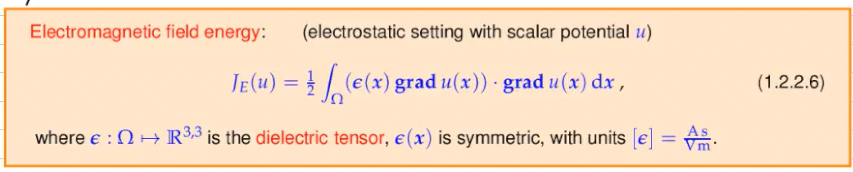

Note:
The physical field will attain minimal electromagnetic field energy (1.2.2.16)
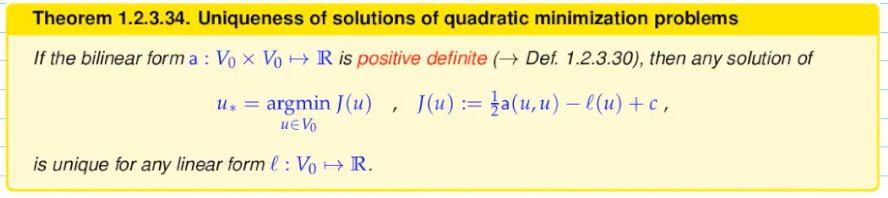
Video 1.2.3 Quadratic Minimization Problems (21 min)
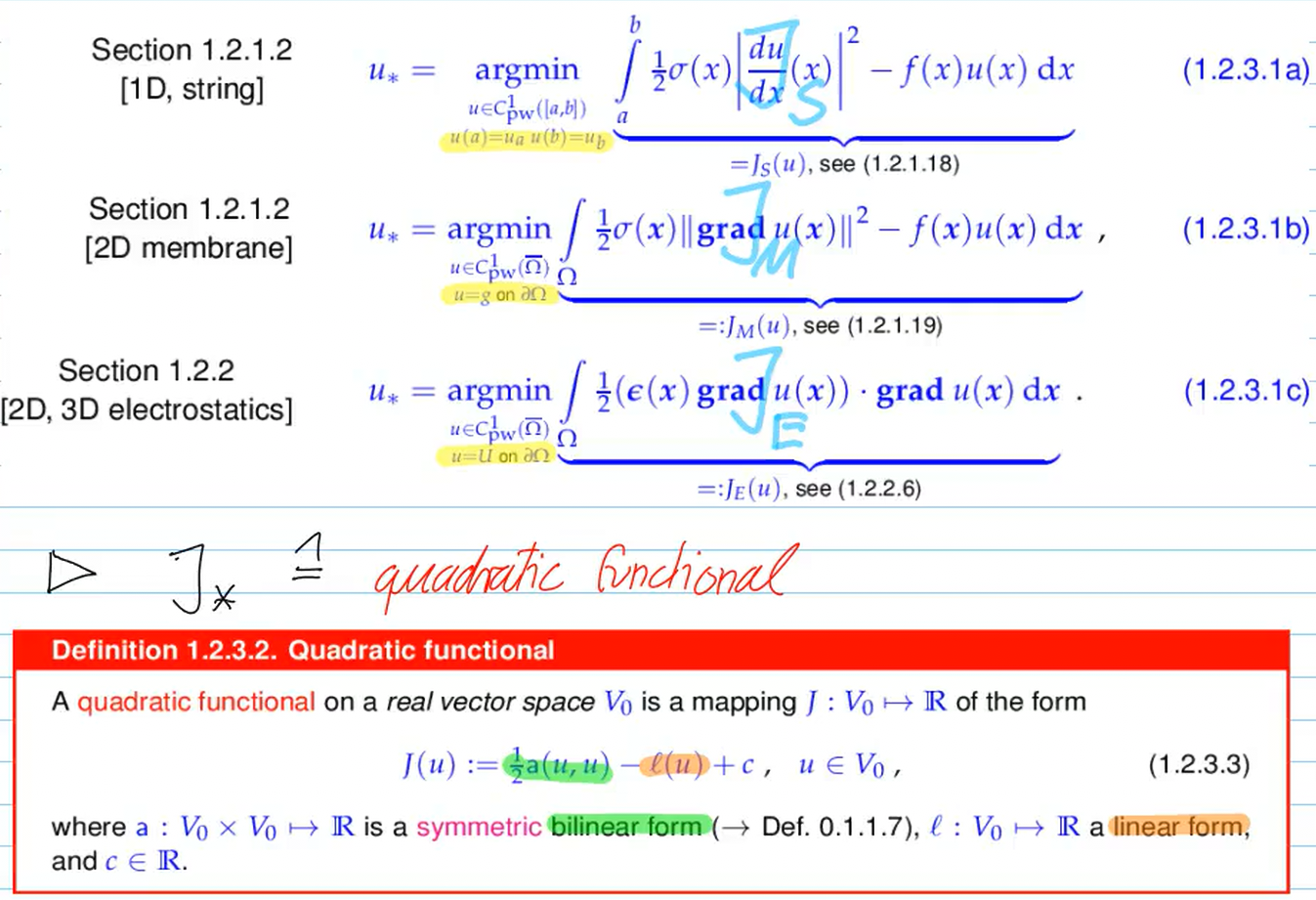
A minimization problem
is called a quadratic minimization problem, if
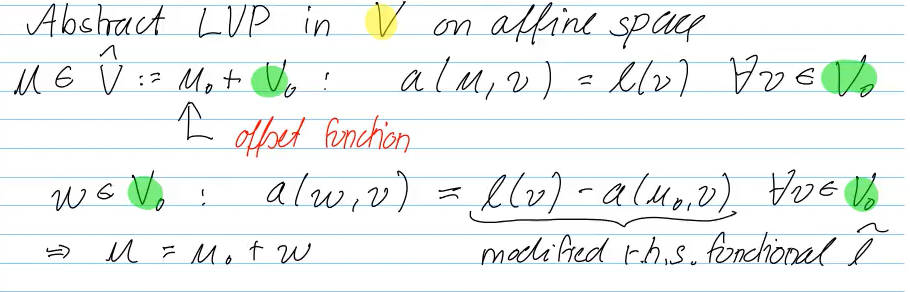
extension to affine space:

Recall from LA:

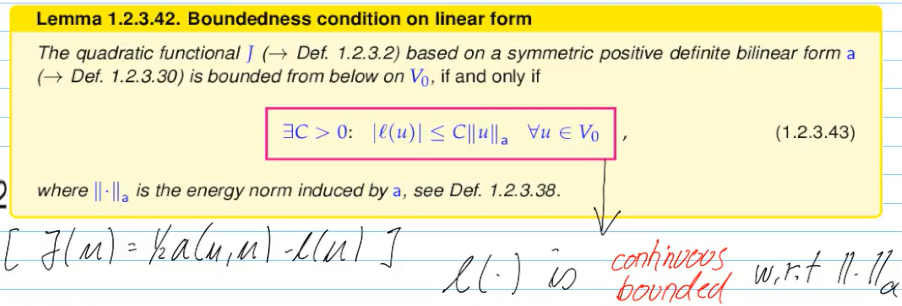
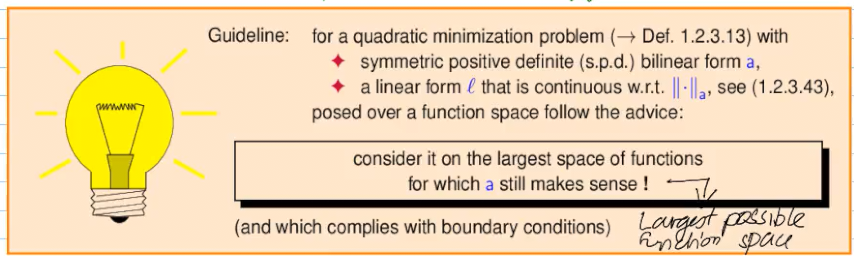
we are trying to find the most stable/lowest energy state of the system. The idea is to find a general formula for the structurally similar string/membrane/electricity problem, which can be described by a Quadratic functional:
However, we can only solve the problem if the energy formula has a minimum (imagine the energy formula as a paraboloid "bowl"):
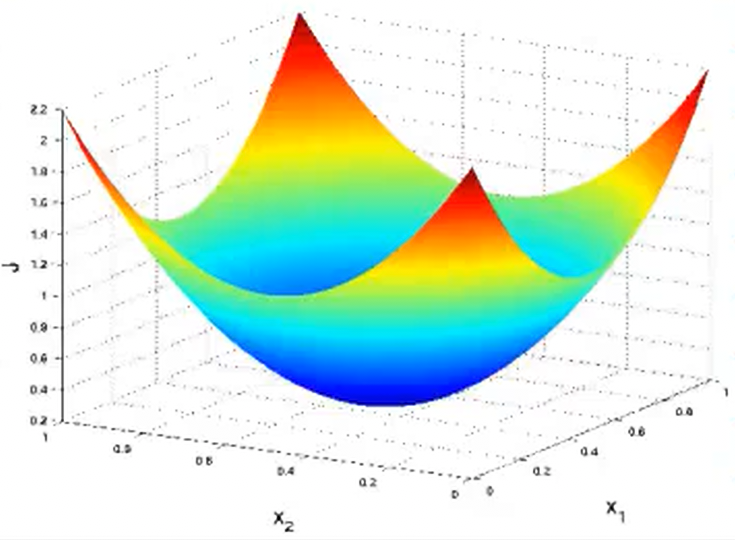
Thus, for
-> bilinear form must be at least semi-positive definite , where energy norm. -> linear form must be bounded/continuous with respect to energy norm. This ensures the "load" isn't so strong that it rips the system apart.
#todo add some integrals to the tldr
Video 1.3 Sobolev spaces (22 min)
have a bad reputation as having a useless mathematical sophistication
choose
=> energy space generated by
in contrast to
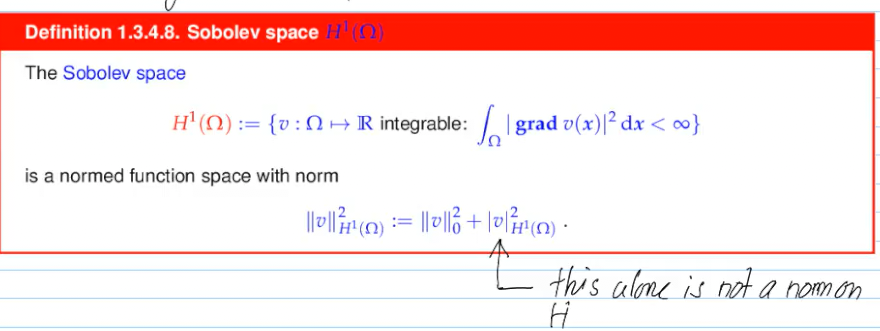
Sobolev space without boundary conditions:
the
If
Most concrete results about Sobolev spaces boil down to relationships between their norms. The spaces themselves remain intangible, but the norms are very concrete and can be computed and manipulated as demonstrated above.
- Do not be afraid of Sobolev spaces!
- It is only the norms that matter for us, the 'spaces' are irrelevant!
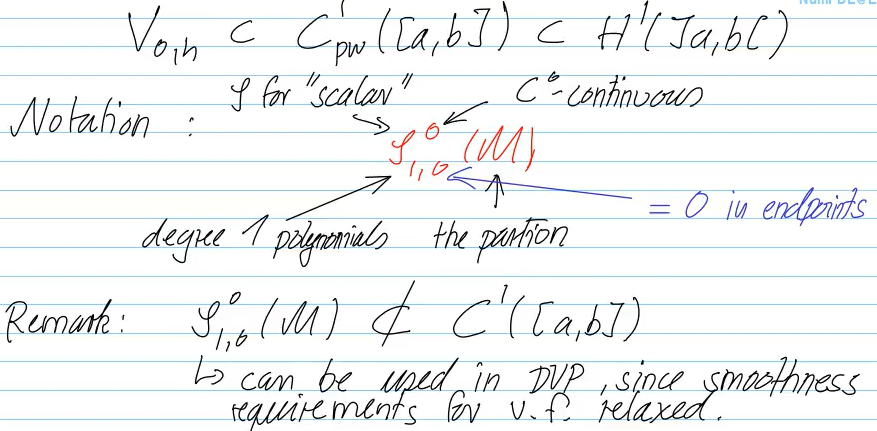
Under the assumptions of Thm. 1.3.4.23 we have for a continuous, piecewise smooth function
If
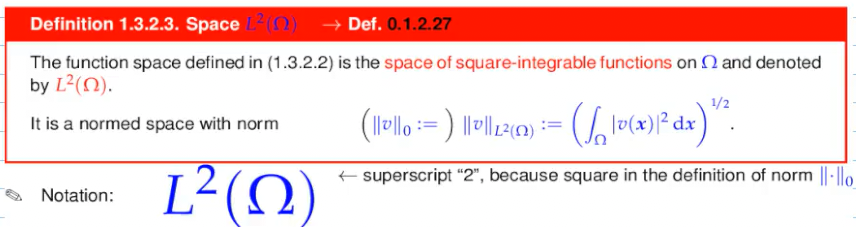
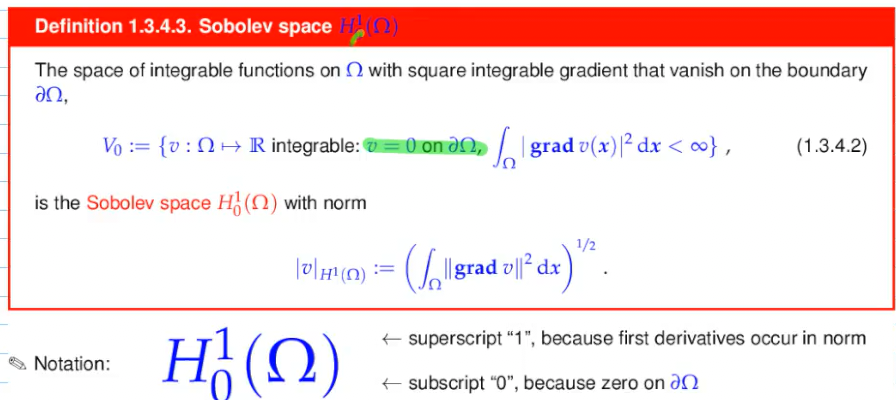
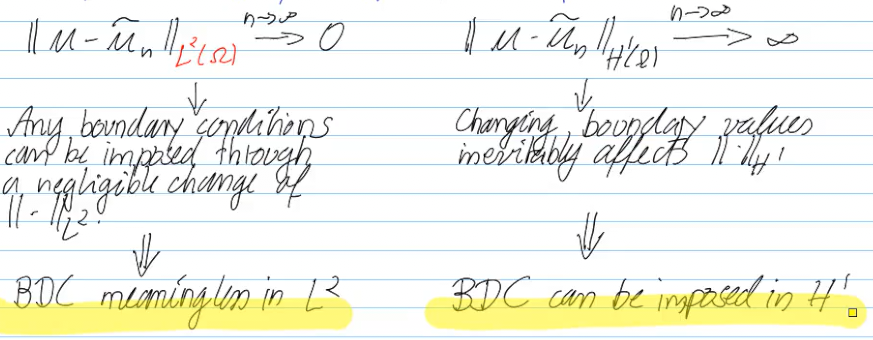
space - space of all functions where . Here, b.c. are meaningless, since changing the function at a single point costs zero energy space - "energy space" for membranes; includes functions where derivatives are square-integrable. Unlike , the b.c. cannot be ignored, since changing a point blows up the derivative -space - with zero b.c. - one can think of
as the space of peicewise smooth, globally continuous functions
- one can think of
Functions of an
Functions of the
Note that
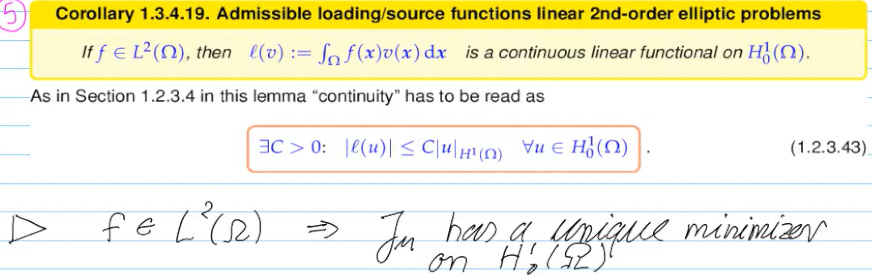
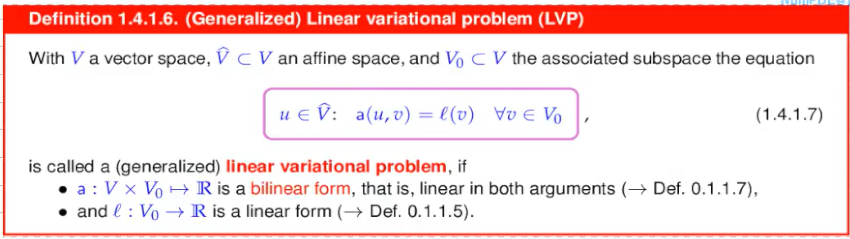
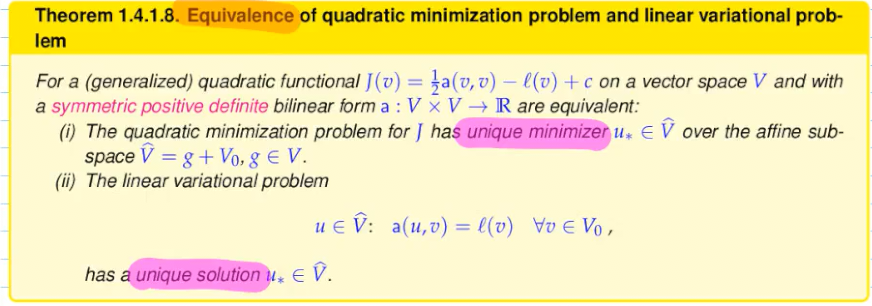
Video 1.4 Linear Variational Problems (21 min)
Poincare-friedrich?

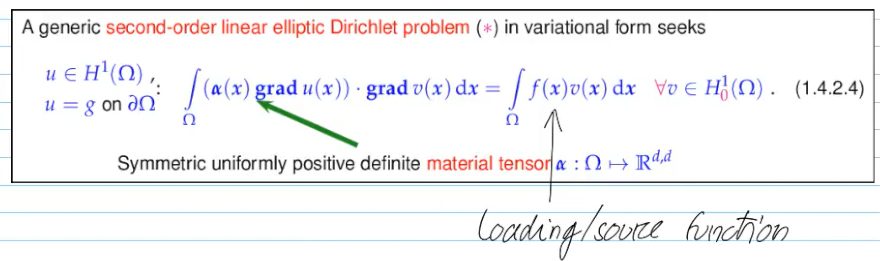
Video 1.5 Equilibrium Models: Boundary Value Problems (22 min)

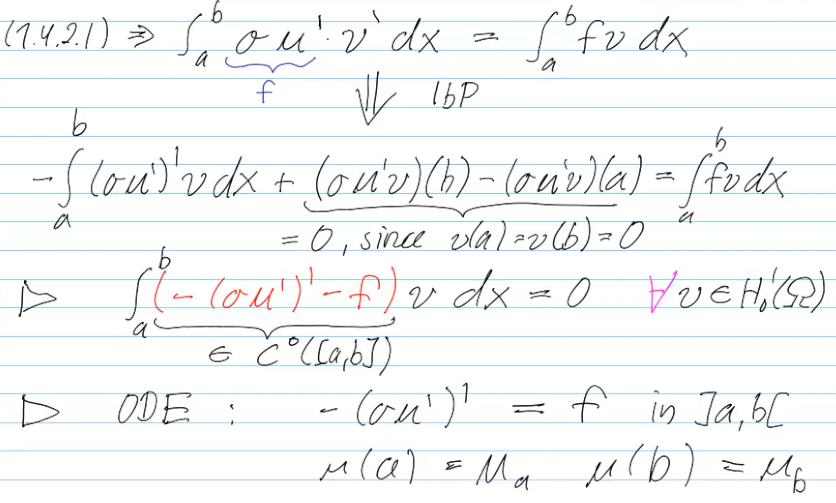
=> 2-pt BVP (a Dirichlet problem) in strong form (vs. "weak form" = LVP)
If
then
Video 1.6 Diffusion Models: Stationary Heat Conduction (5 min)
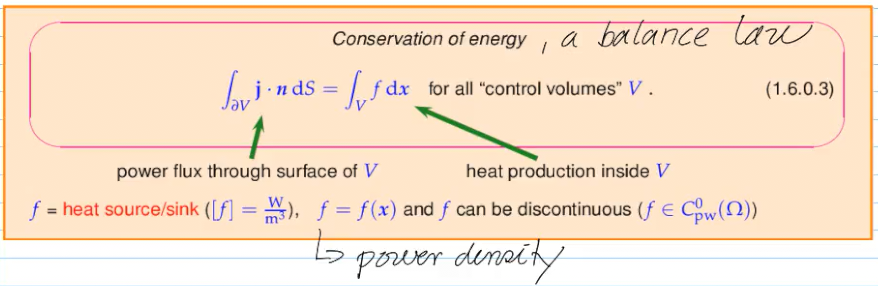
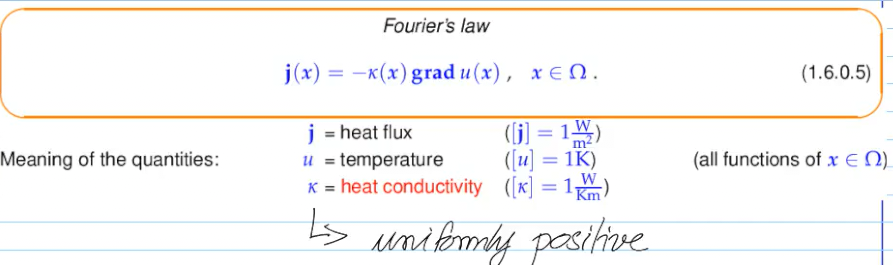
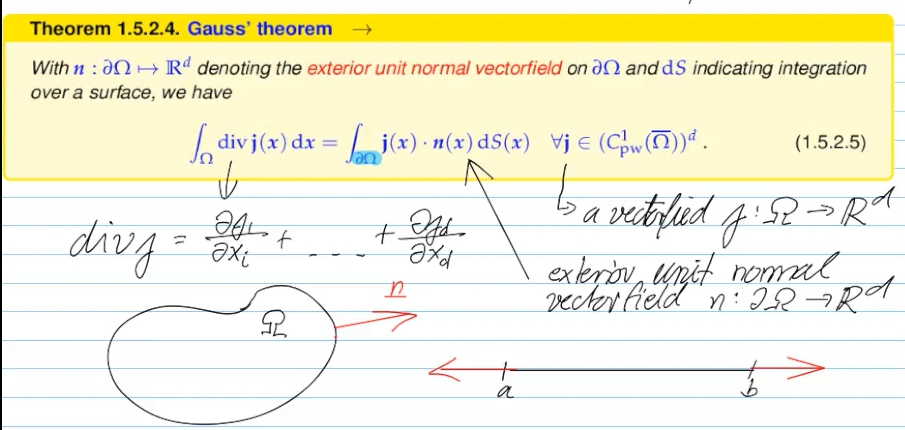
by combining those two using Gauss theorem, we get:
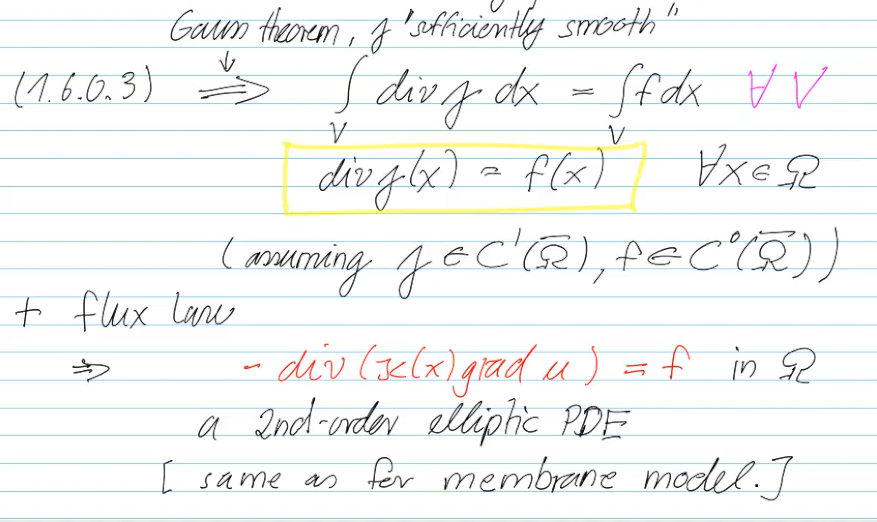
=> we reach at the same PDE as for the membrane model
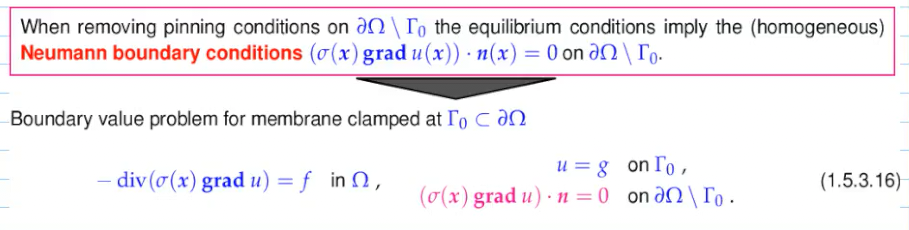
Video 1.7 Boundary Conditions (07.35 min)
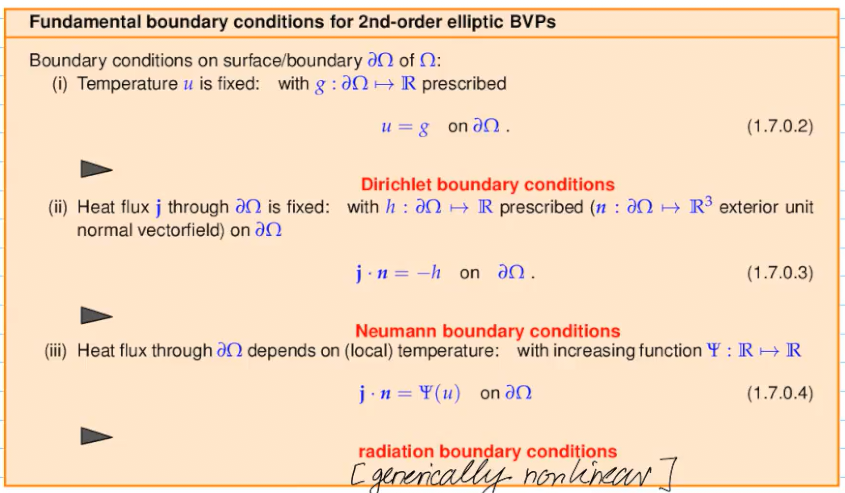
example of a mixed BVP:
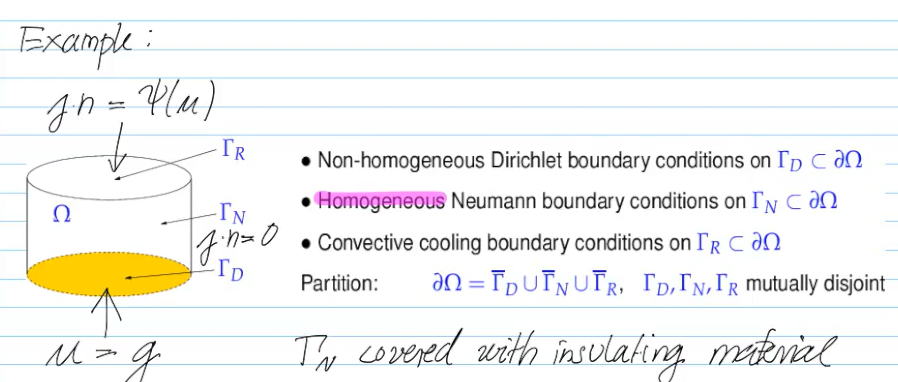
For second order elliptic boundary value problems exactly one boundary condition is needed on every part of
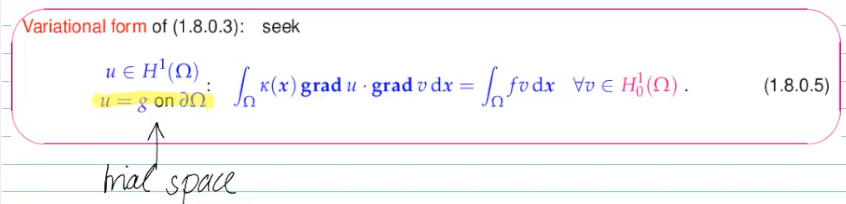
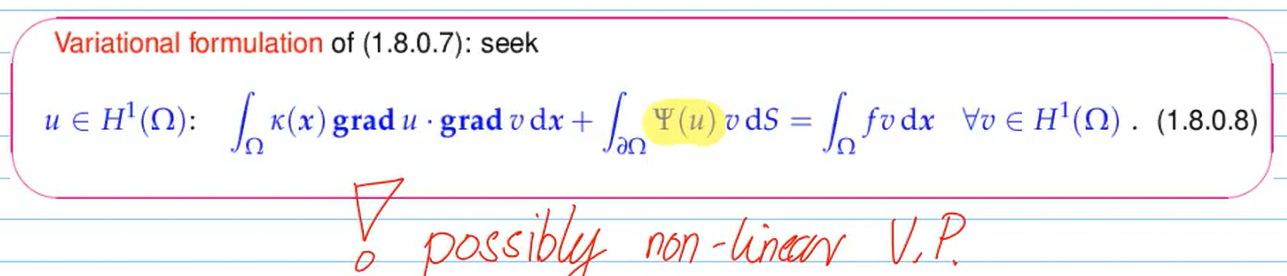
Video 1.8 Second-Order Elliptic Variational Problems (13 min)
for Dirichlet BVP:
for Radiation BVP:
for Neumann BVP:



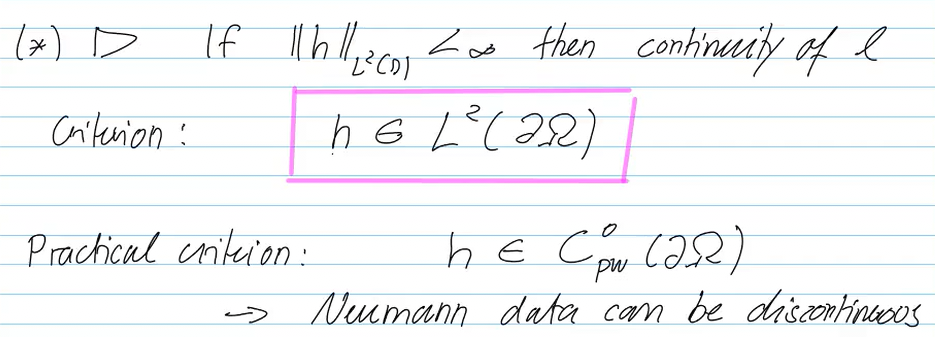
If
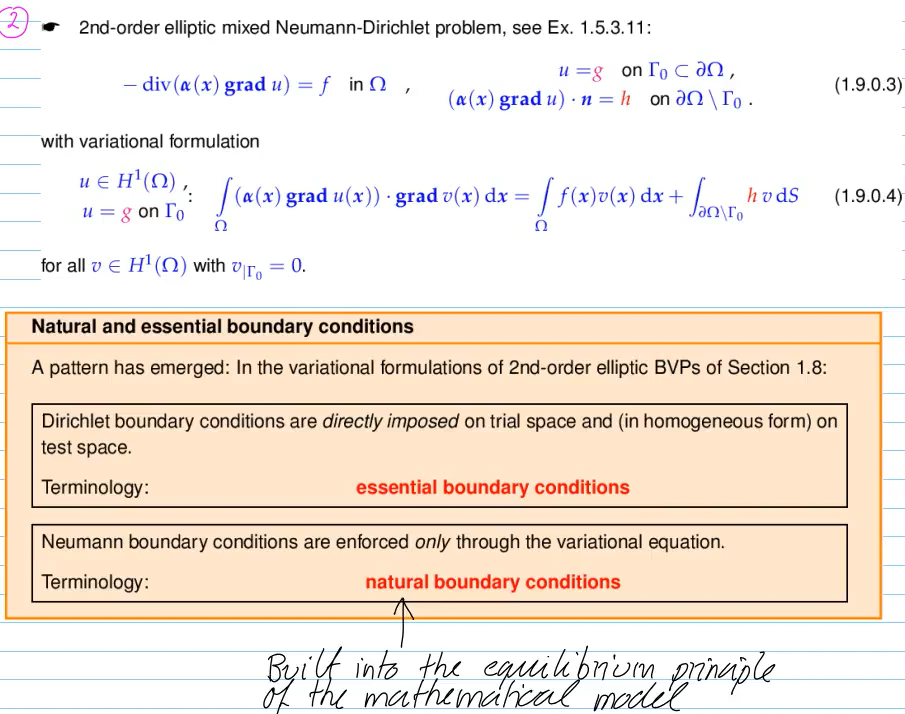
Video 1.9 Essential and Natural Boundary Conditions (18 min)
summary of 1.4 - 1.9:


For a summary of this week, see the notes from the exercise session:
-> ETH_NumericalMethodsForPDE_Übungen#^75b794
2. Finite Element Methods (FEM)
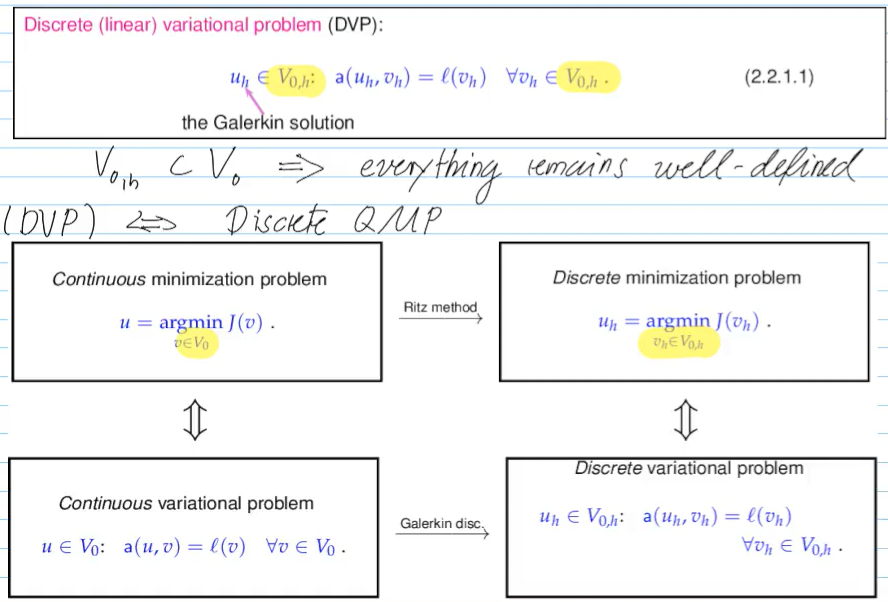
Video 2.2 Principles of Galerkin Discretization (25 min)
graph LR A[Variational boundary
value problems] -- discretization --> B["System of a finite number of equations for (real) unknowns"]

garlekin discretization in two steps:
Replace the infinite-dimensional function space
-> "h"
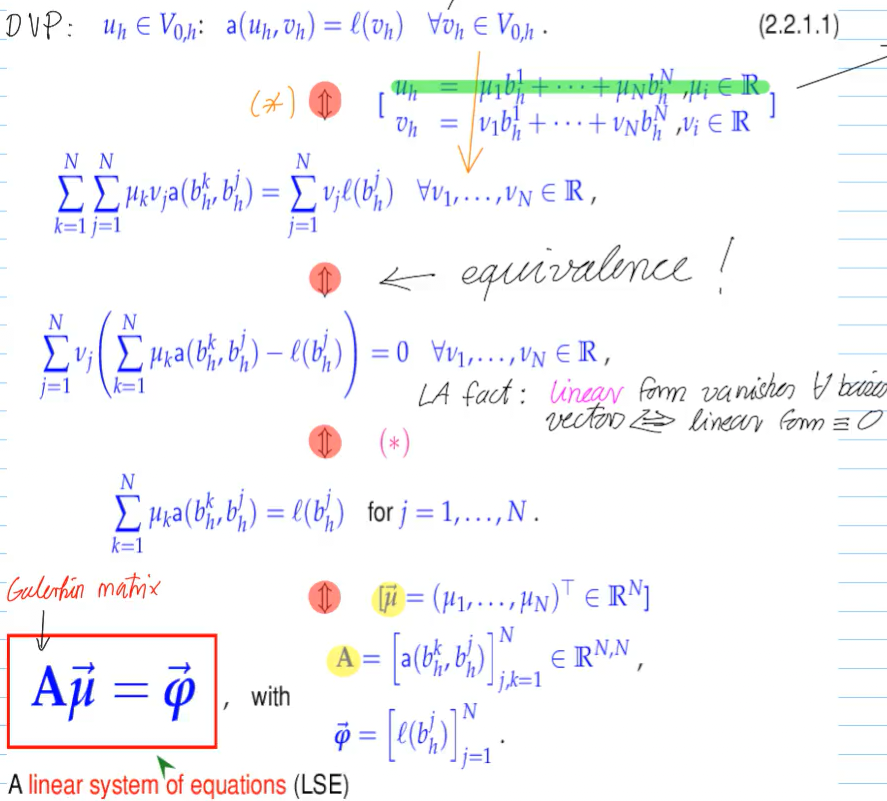
- Choose basis, then plug basis expansions int DVP, and use (bi-linearity)
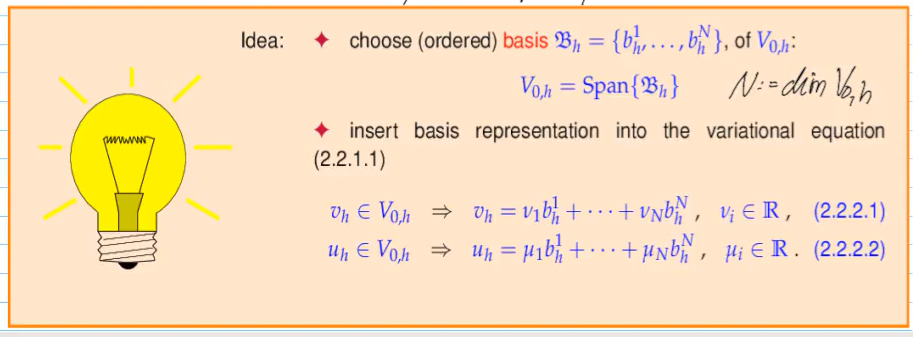
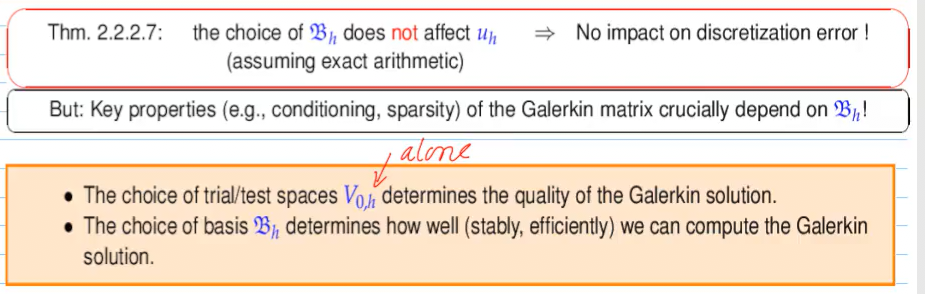
The choice of the basis
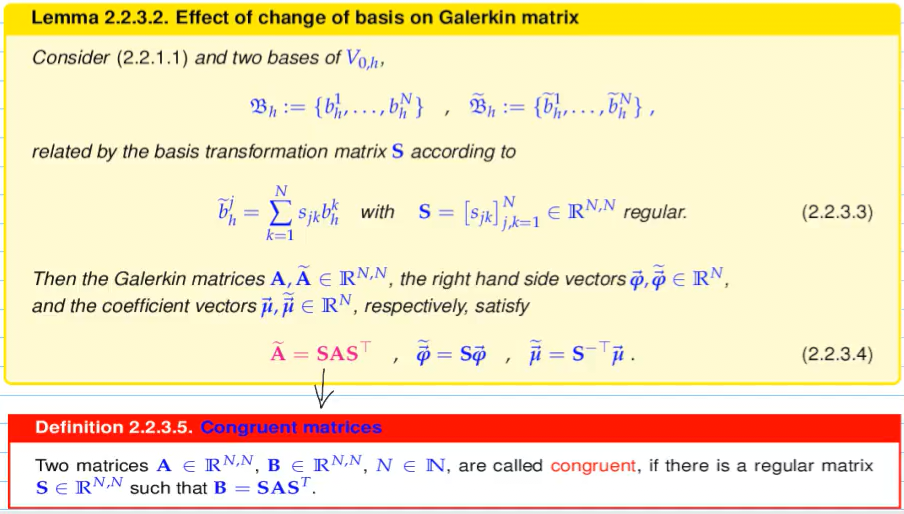
Properties all Garlekin matrices for a DVP (all matrices from a congruence clas) share:
- regularity (invertibility)
- symmetry
- pos.dev.
Video 2.3 Case Study: Linear FEMfor Two-Point Boundary Value Problems (24 min)
NOTE:

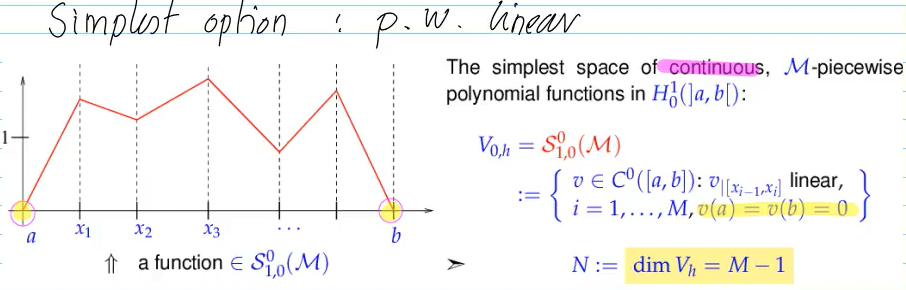
Idea underlying the finite element method: approximate

Video 2.4 Case Study: Triangular Linear FEMin Two Dimensions I (28 min)
- In 1D, we partition the domain
into an 1D Mesh - In 2D, we use triangulation
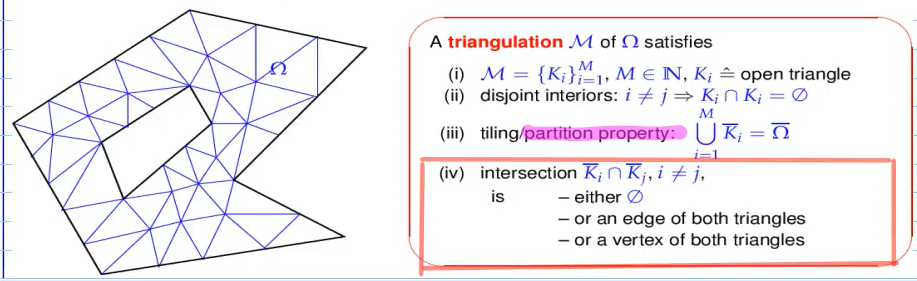
-
- means: no hanging nodes (nodes that are on the edge of another triangle)
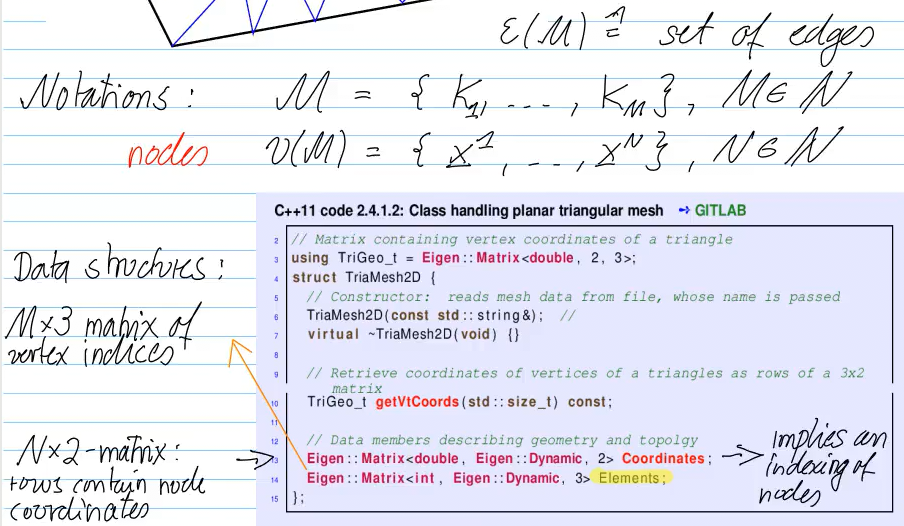
set of edges
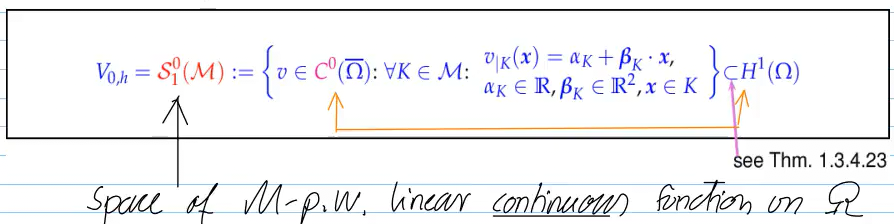
test space in 2 (space of M-p.w. linear continuous function on
tent function alternative in 2D:
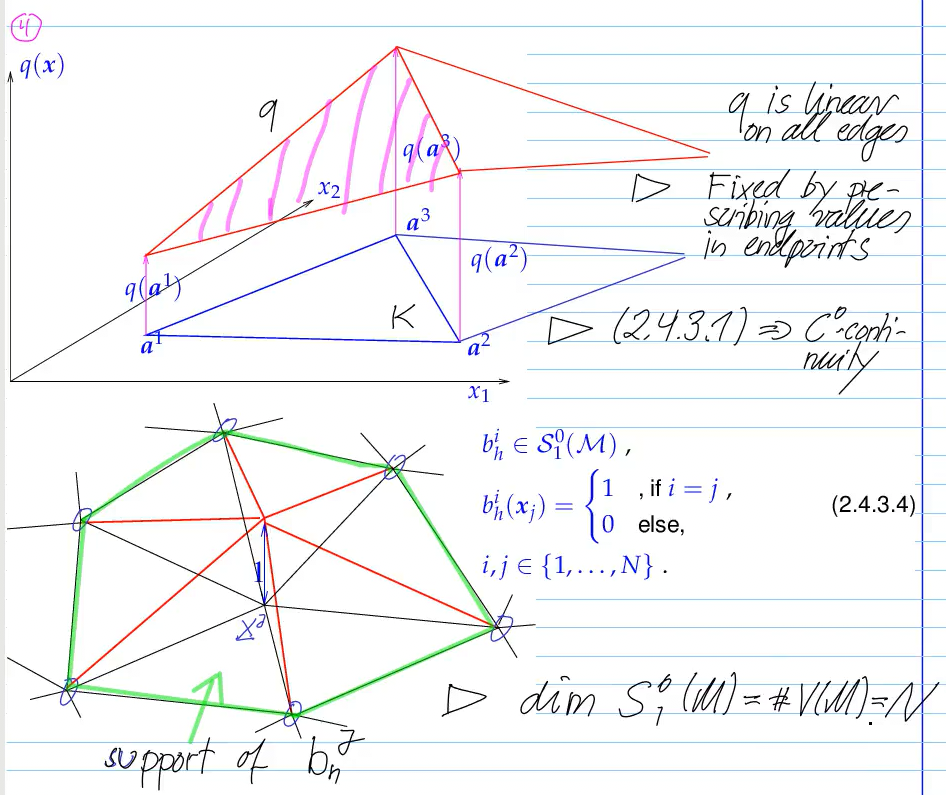
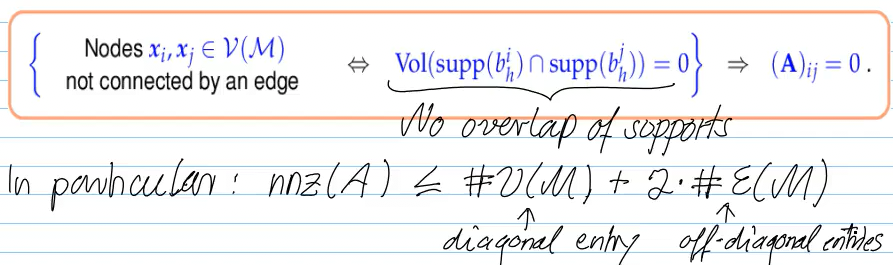
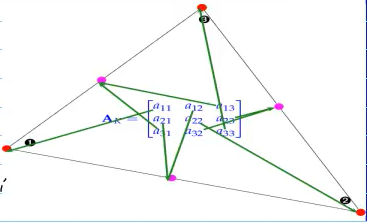
In 2D, the Galerking matrix does not have a nice structure like in 1D; however, it is still sparse, since nodes unconnected by edges result in a 0 in the Matrix:
Video 2.4 Case Study: Triangular Linear FEMin Two Dimensions II (32 min)
Galerkin discretization based on a nodal basis of tent functions and a triangular mesh:
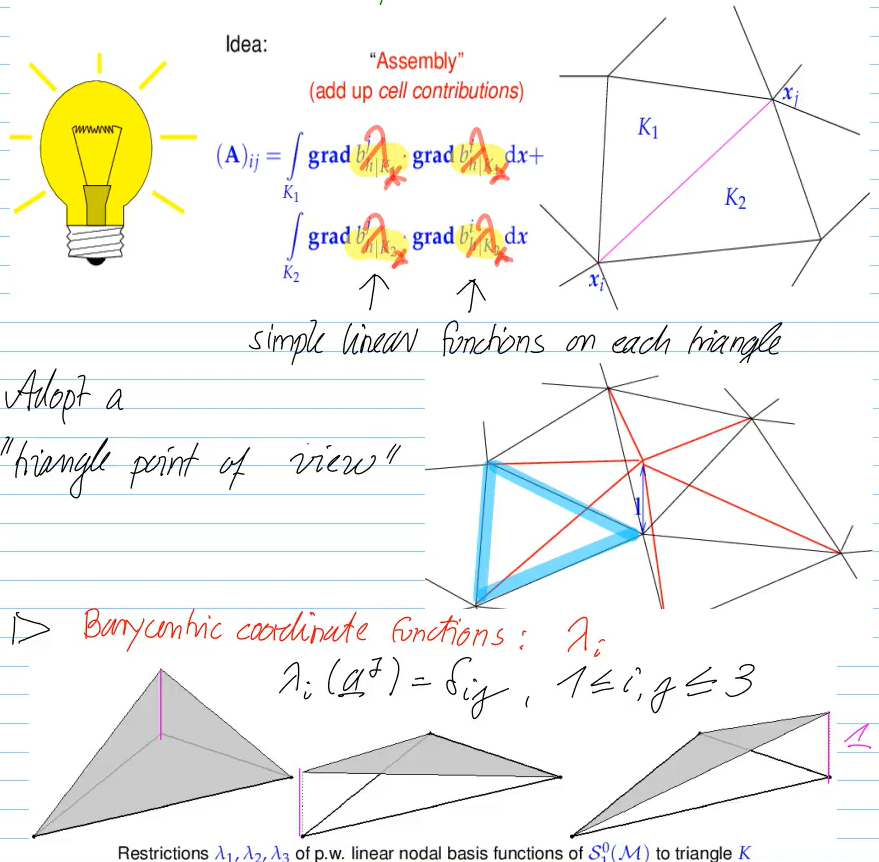
there are two approaches to creating the Galerkin-matrix:
- assemble matrix from all vertices
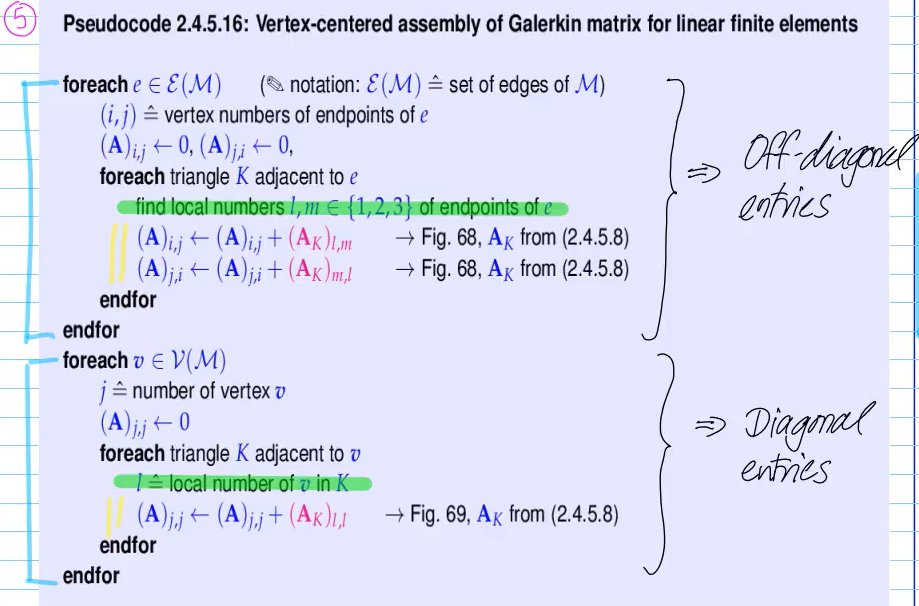
Problems:
- Edges not available in data structure (see first 2.4 video)
- Triangles adjacent to nodes not available
- cell-oriented approach, by "distribute & add"
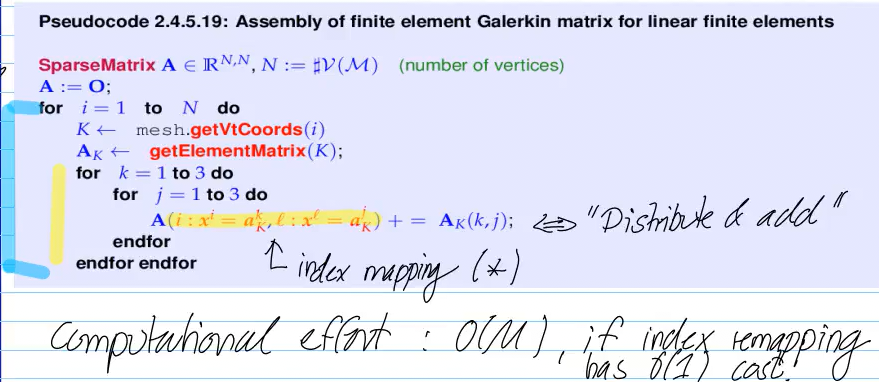
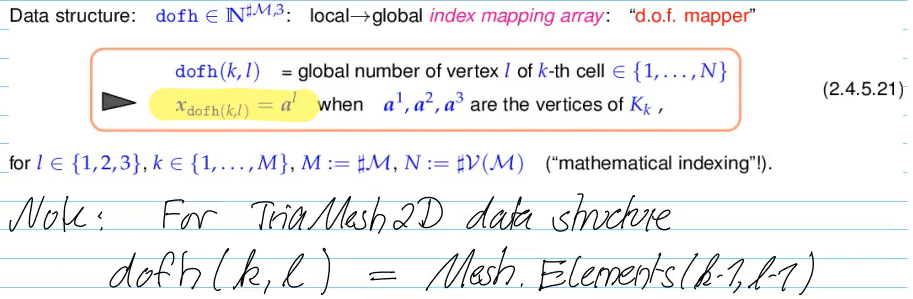
dof: degrees of freedom
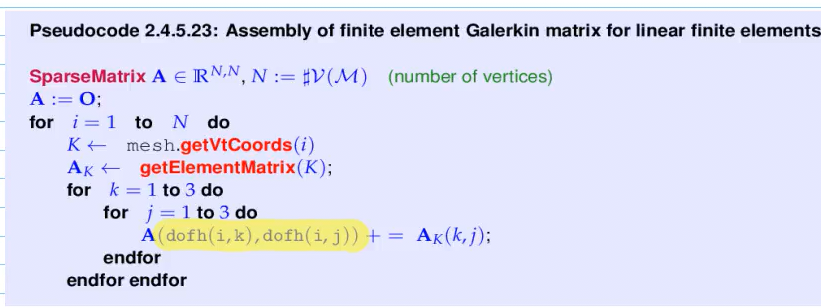
now, we assemble everything:
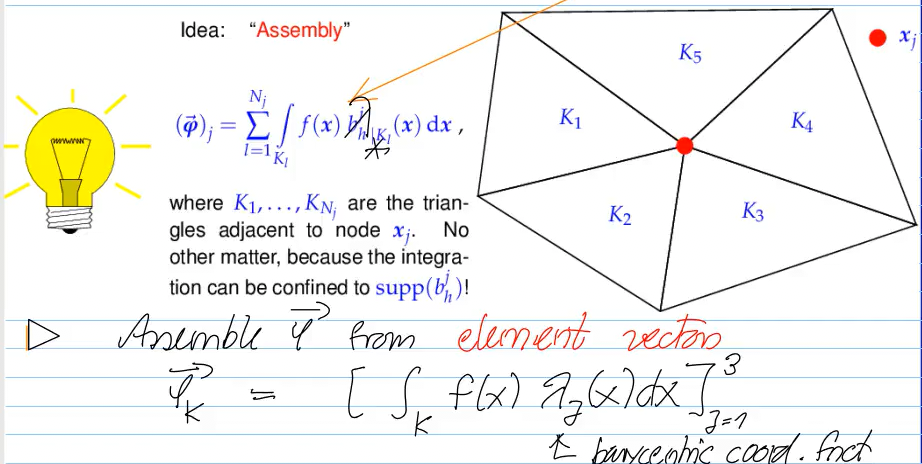
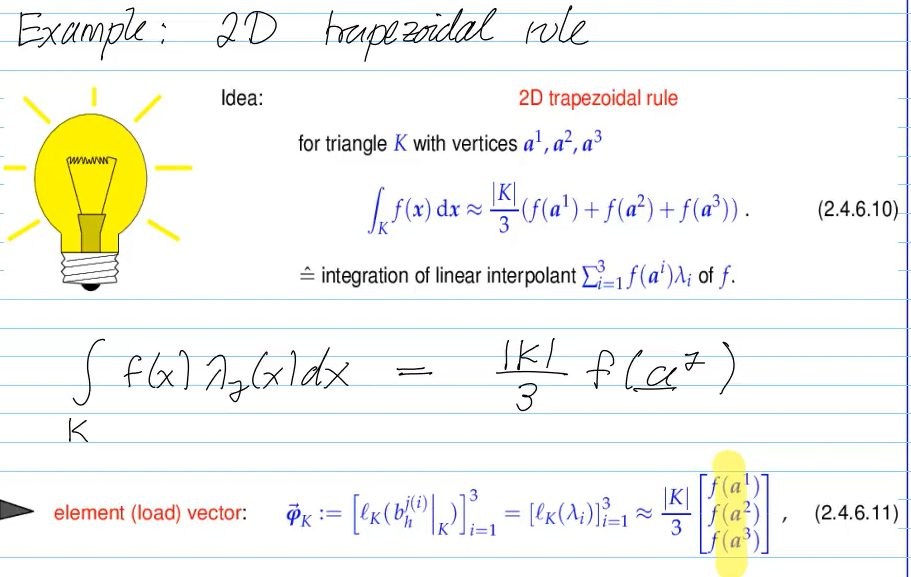
for the RHS, we can compute the integral using composite trapezoidal rule (we are working with triangles anyways):
We are trying to get variational problems from infinite-dimensional function spaces to something discrete by
- choosing a finite-dimensional subspace
, where the bilinear and linear form remain well-defined - choosing an ordered basis
for the subspace , and using the basis to convert problem into a linear system
In those two steps, the problem can be transformed into a LSE
In the first step of the discretization, our goal is to replace space
- define Mesh
. Normally, we use triangulation - pay attention that the mesh does not have "hanging nodes" (2.4.1) - choose a "building block" function to use for each cell. Normally, pecewise linear functions are used, evtl. quadratic or cubic polynomials
- ensure
-> do not use piecewise constants, since then , e.g. if
- incoroporate boundary conditions, in case of Dirichlet by discarding any basis functions with nodes on the boundary
4. choose a basis
- convert to a linear system by exploiting bilinearity of
and linearity of :
: Galerkin/stiffness matrix, , how basis functions interact through the bilinear form : load vector, : solution vector; the final Galerkin solution (basis, weighted by solution vector)
- no impact on Galerking solution; however:
- basis functions with small local support (e.g. tent function) results in a sparse matrix -> desired outcome
- basis choice determines condition number of matrix -> sensitivity to rounding errors
Video 2.5 Building Blocks of General Finite Element Methods (22 min)
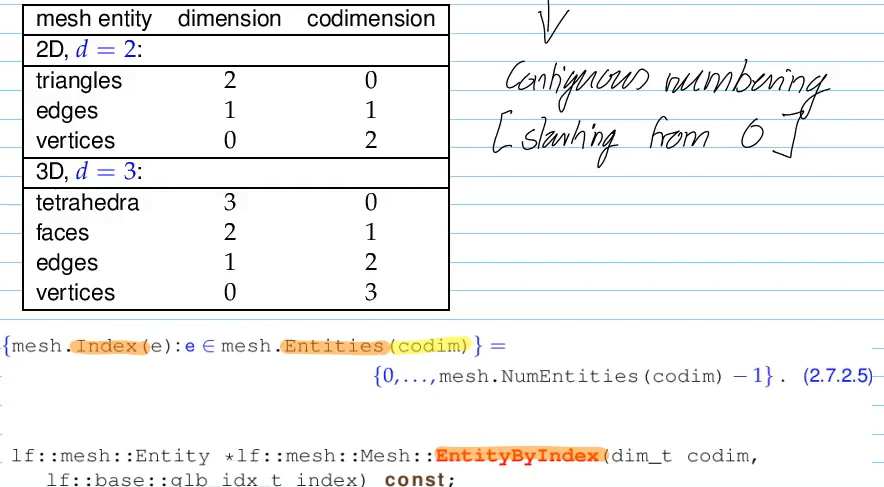
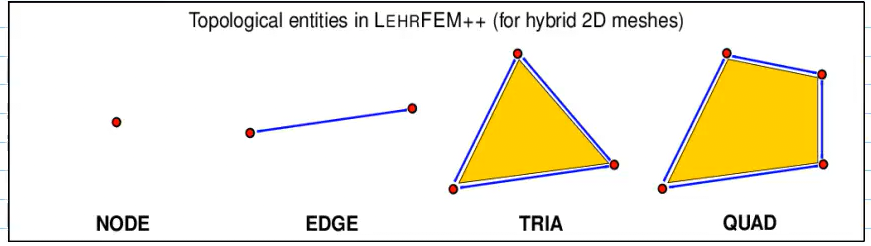
meshes
2D: {cells, edges, nodes}=(mesh/geometric) entities
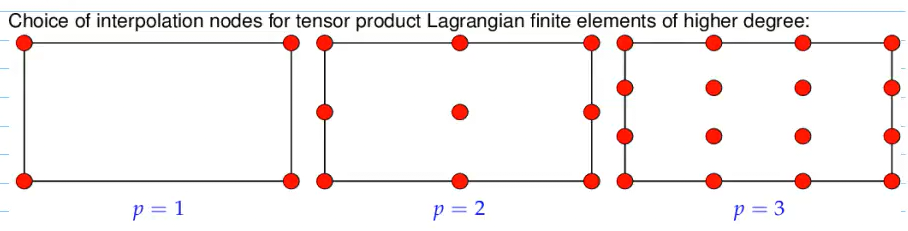
polynomials
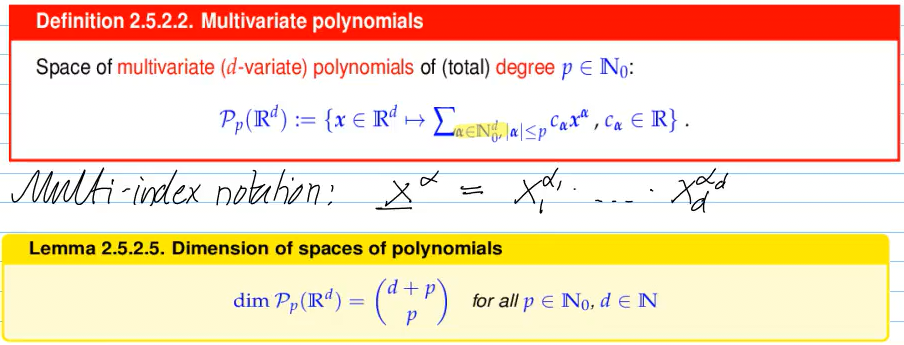
1st option: e.g.
Space of tensor product polynomials of degree
2nd option: e.g.
basis functions (also called global shape functions (GSF), degrees of freedom)
Third main ingredient of FEM: locally supported basis functions (see Section 2.2 for role of bases in Galerkin discretization)
Basis functions
- (
) is basis of , - (
) each is associated with a single geometric entity (cell/edge/face/vertex) of , - (
) , if associated with cell/edge/face/vertex .
we want local support:
- if
, don't overlap, entries in Galerkin matrix => sparse matrix
generalization of barycentric coordinate functions:
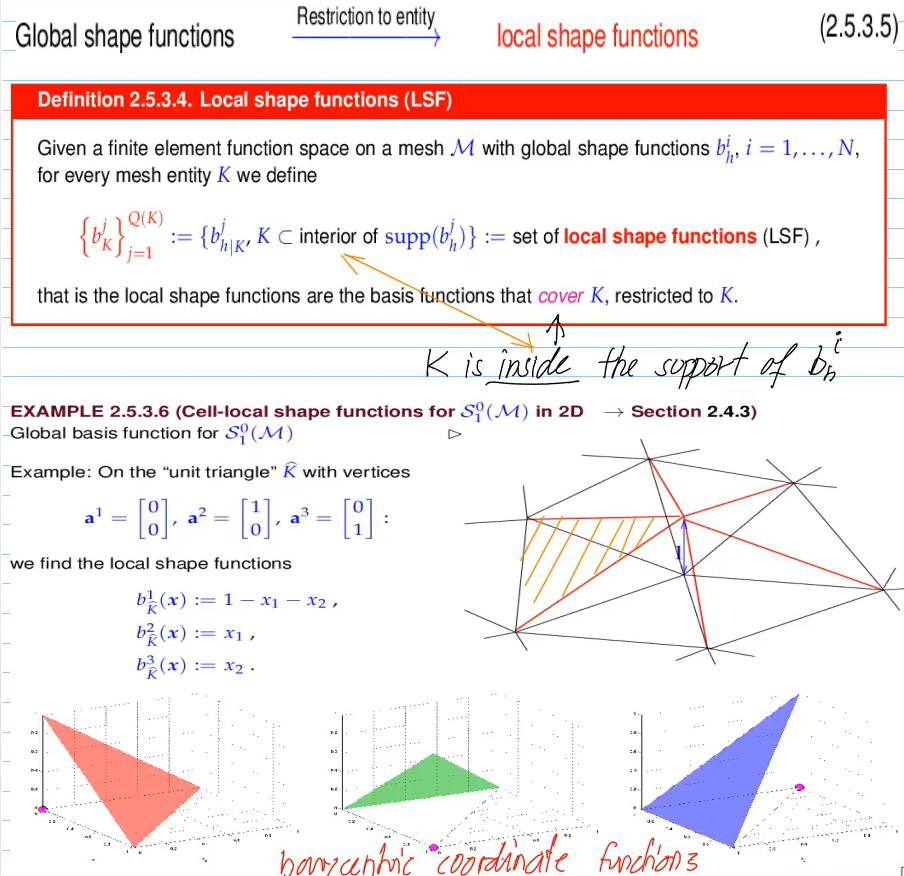
Video 2.6 Lagrangian Finite Element Methods (23 min)

one triangle, with Kardinal property:
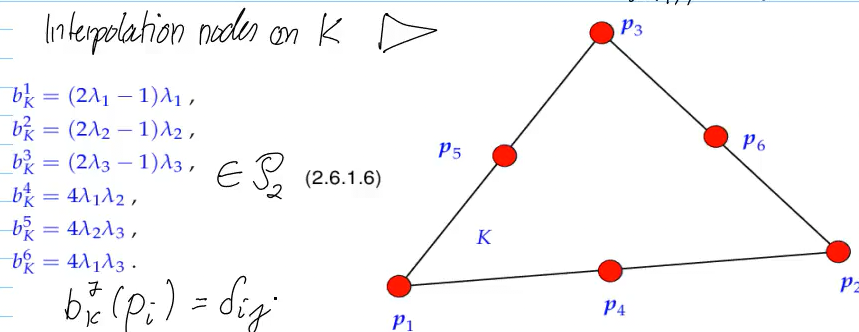
gluing triangles (interpolation nodes):
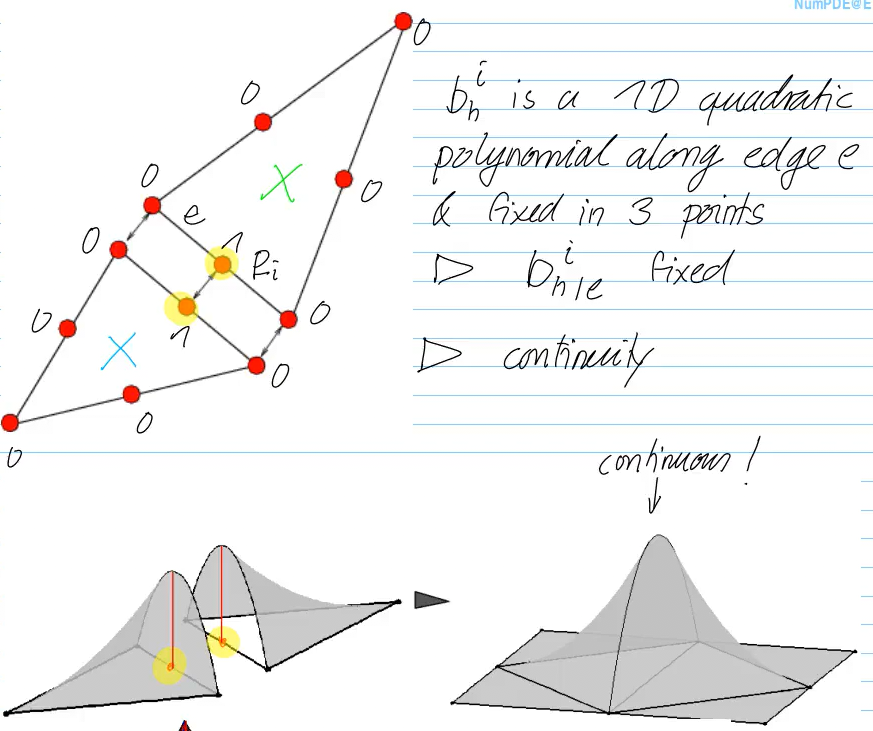
-> globally continuous piecewise function
for more dimensions, we "subdivide"; then, we might also have interpolation nodes inside the shape
for hybrid mesh:
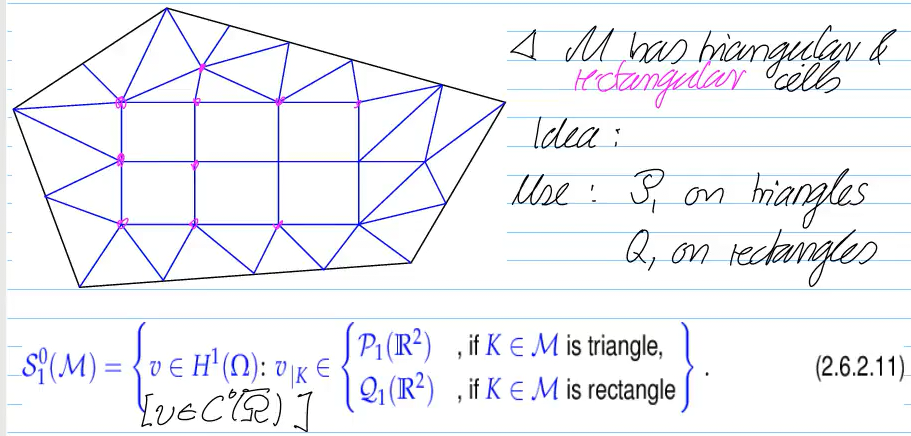
works, becuase functions
works for any degree!
Video 2.7.2 Mesh Information and Mesh Data Structures (21 min)
problems with FEM:
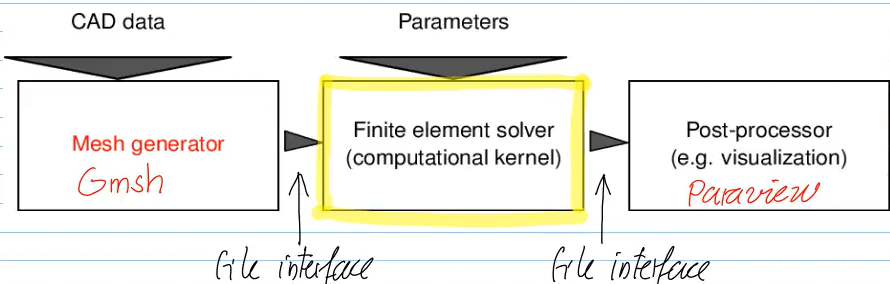
// factory object creates mesg entities auto of 2D mesh data structure from information contained in mesh_file
auto factory = std::make_unique<lf::mesg::hybrid2d::MeshFactory>(2);
lf::io::GmshReader readermove(factory), mesh_file.string();
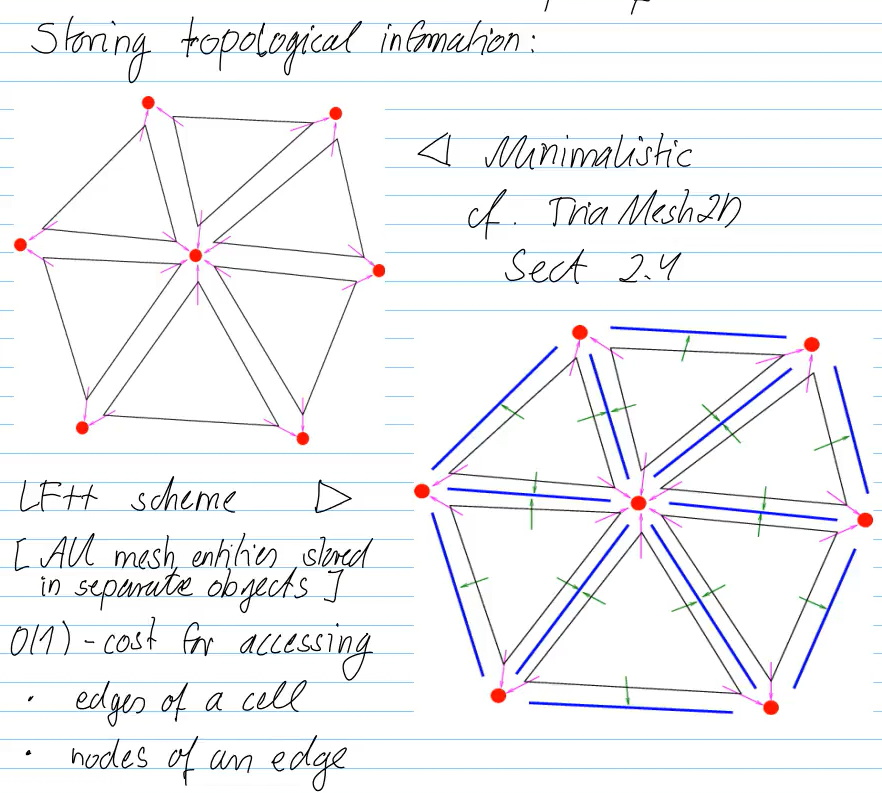
we need
- container (tranversal + ordering/indexing of entities)
- topology (incidence/adjecency)
- geometry (node locations, entity shapes)
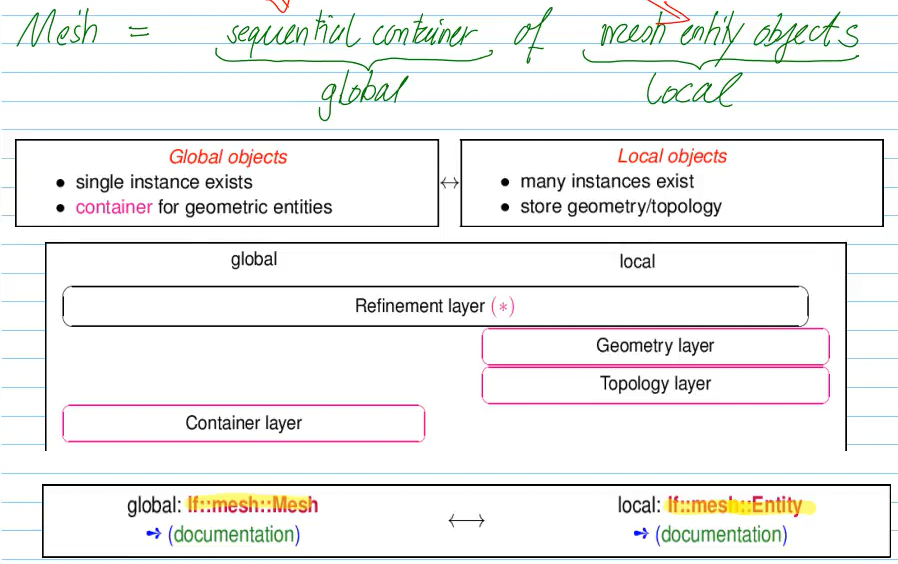
mesh
- index access
- loops:
for(const lf::mesh::Entity &entity : mesh.Entitiy(codimension));
topology layer
access:

auto sub_entities_range = entity.SubEntities(sub_codimension);
for(const: lf::mesh::Entity &subentity : sub_entities_range)
mesh.Index(subentity);
geometry layer
- geometry object attached for every entity interface
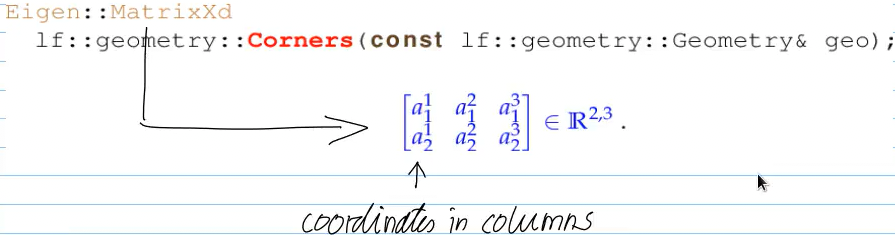
const lf::geometry::Geometry *geo_ptr = entity.Geometry();
Eigen::MatrixXd corners = lf::geometry::Corners(*geo_ptr);
Video 2.7.4 Assembly Algorithms (26 min)
continuation of 2.4
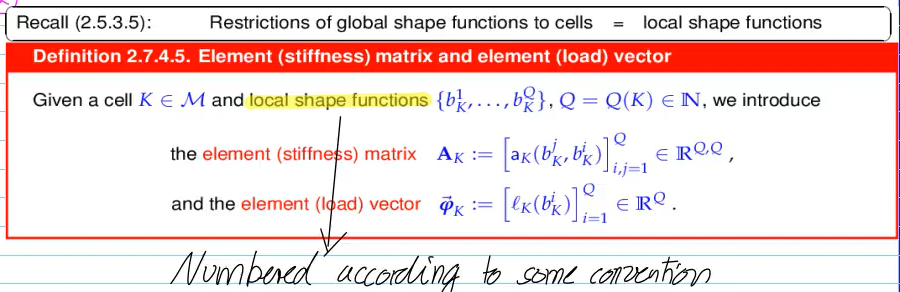
assembly algorithms: building of FE Galerkin amtrix/r.h.s. vector from local contributions
we can split the integrals from the weak form into sums of local contributions (see exercise lession, week3, thu, hongg)
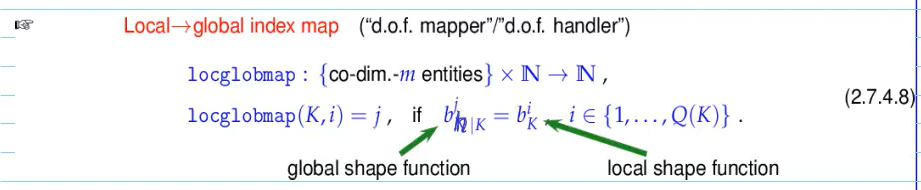
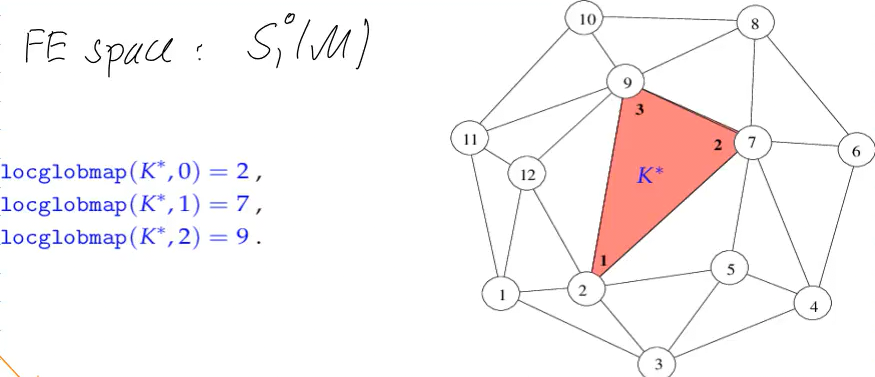
LehrFM numbering rules:
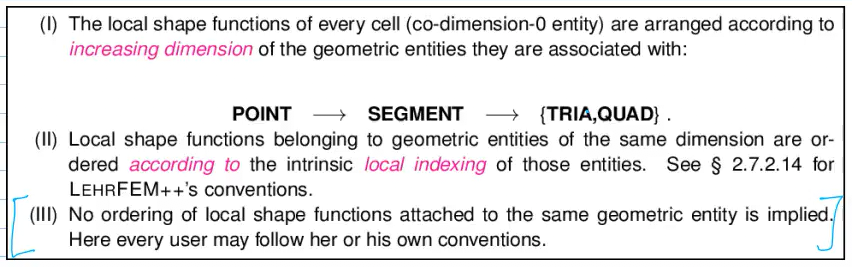
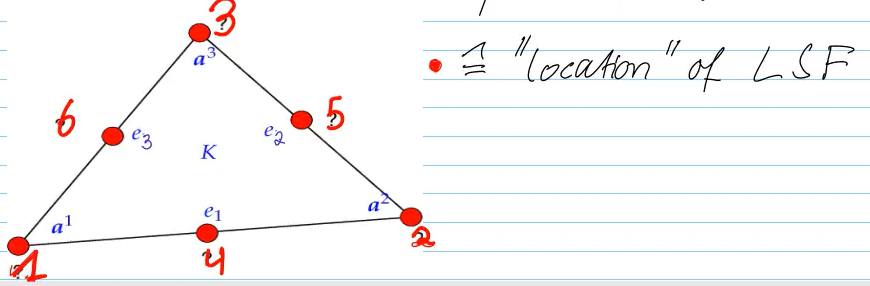
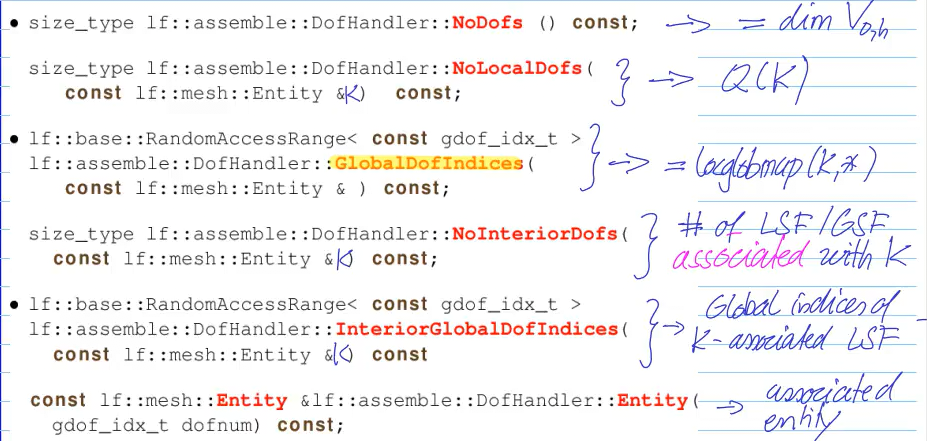
- dimension of Space
- Number of local Dofs (number of local shape functions)
- array of locglobmap for all local indices of entity
- number of local/global shape functions associatet with entity
- global indices of associated local shape functions of indices (not discussed until now)
- global index of entity associated with dof
Initalize dynamic Dof Handler:

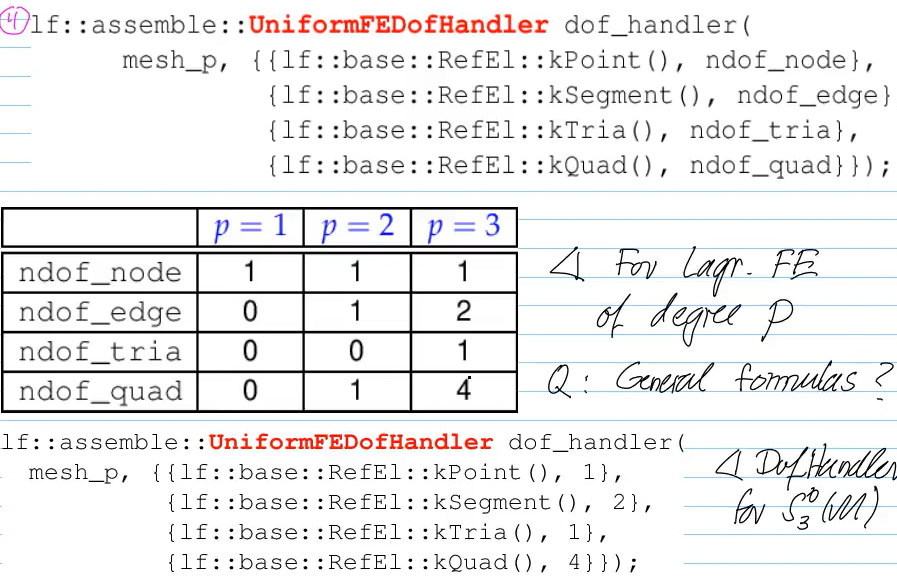
for lagr. FE: uniform no of GSFs associated with entities of same type -> initalization can be simplified:
using dof_map_t = std::map<lf::base::RefEl, base::size_type>;
UniformFEDofHandler(std::shared_ptr<const lf::mesh::Mesh> mesh_p,
dof_map_t dofmap);
example:
distribute pattern used for assembly
- loops over entities +
DofHandlerqueries + local operation
not copied: code 2.7.4.23: Assembly function of LehrFEM++
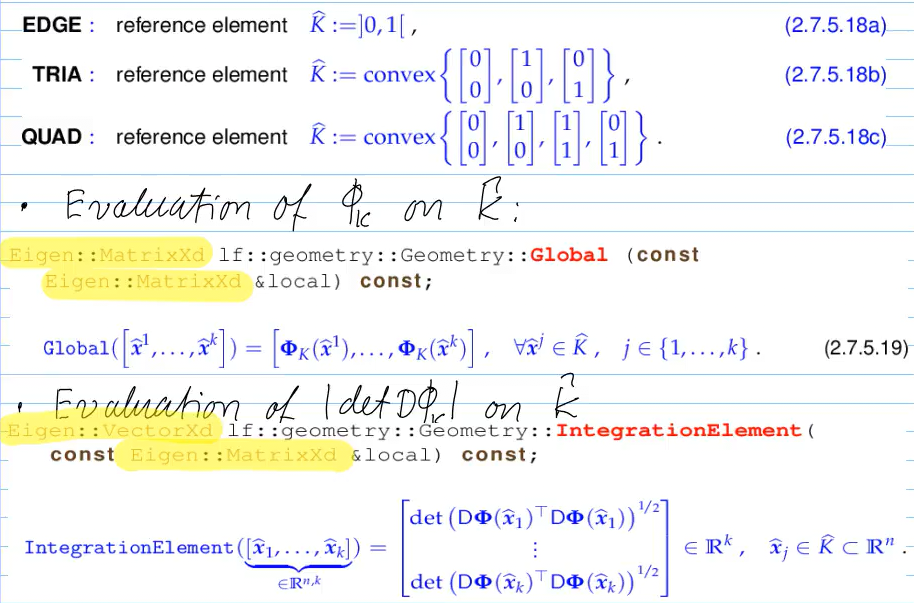
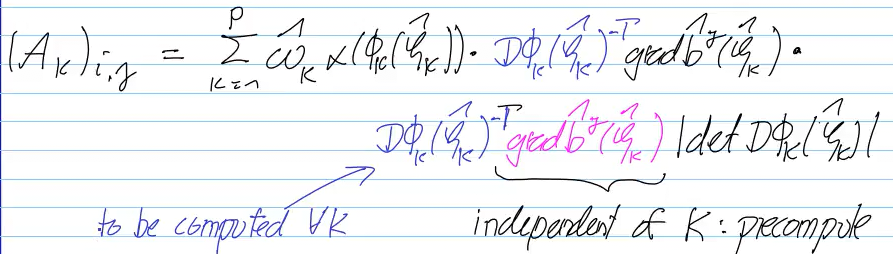
Video 2.7.5 Local Computations (26 min)
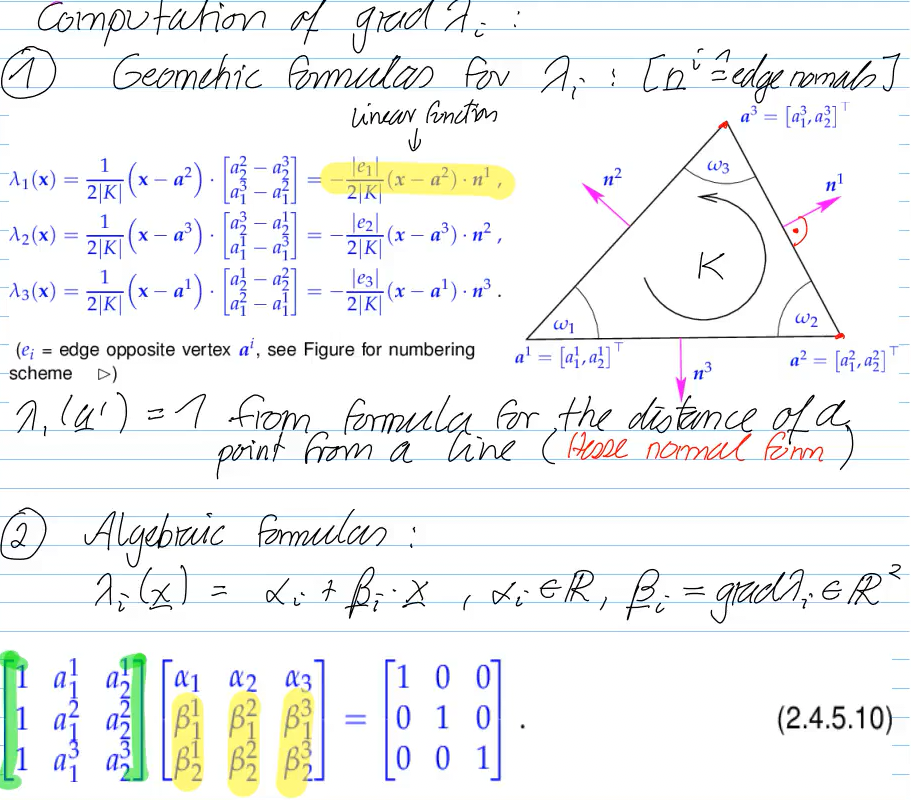
either by analytic computation (only if we have polynomials -> locally constant functions on each cell of the mesh) or
analytic computation:
For any non-degenerate
e.g.

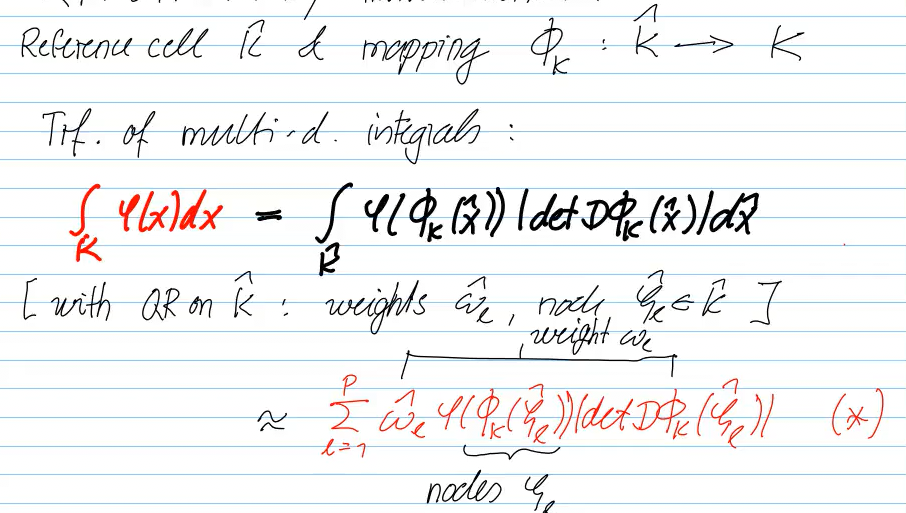
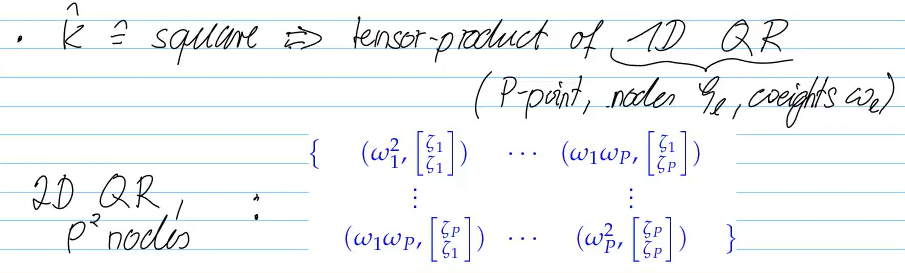
local quadrature
- in 1D: affine mapping
+ transformation formula for integrals - local quadrature rules used in finite element methods are botained by transformation from (a few) local quadrature rules defined on reference elements.
- in 2D:
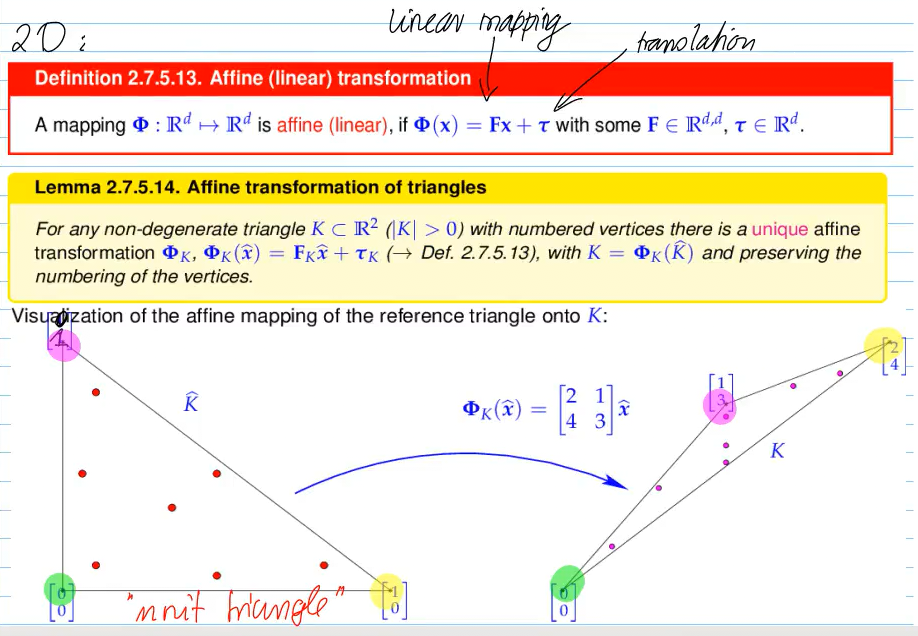
(affine mapping maps lines to lines)
general formula:

example on
however, if

in LehrFEM, we can use:
A local quadrature rule according to Def. 2.7.5.9 is said to be order
- for a simplex
(triangle, tetrahedron) it is exact for all polynomials , - for a tensor product element
(rectangle, brick) it is exact for all tensor product polynomials .
"order
transformation on affine maps preserves polynomials
-> integral transformation doesn't change order of polynomials
quadrature rules in LehrFEM: reference object shape + desired order

not copied: code 2.7.5.41: Entity-based composite numerical quadrature
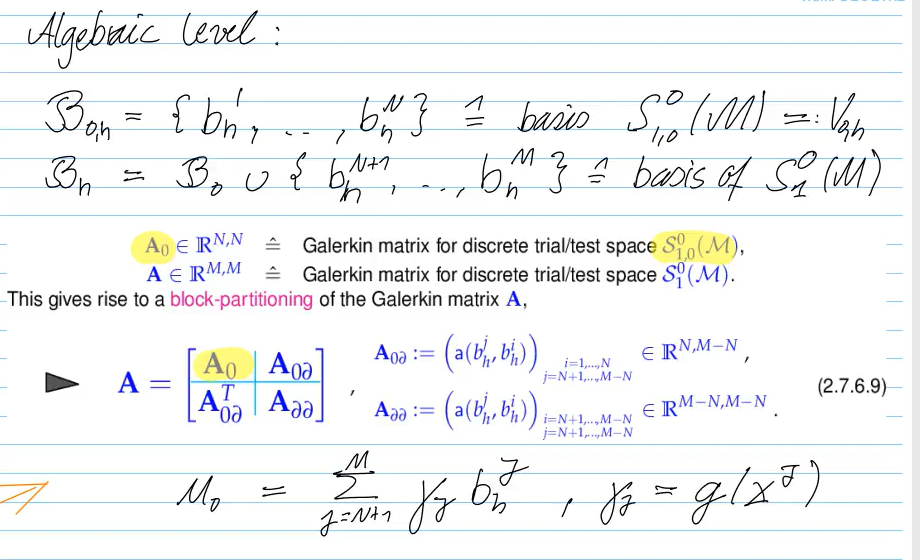
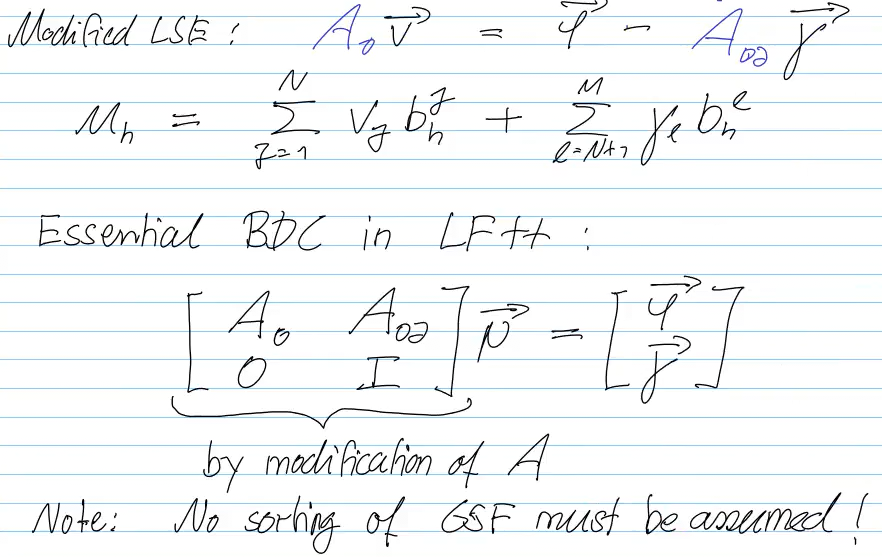
Video 2.7.6 Treatment of Essential Boundary Conditions (21 min)
#todo understand offset function:
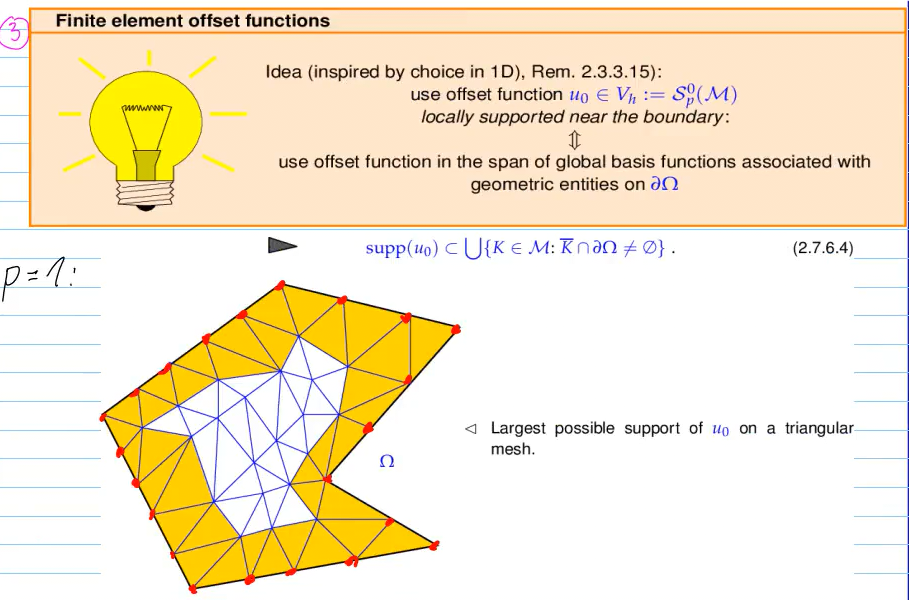
maybe missed something relevant...
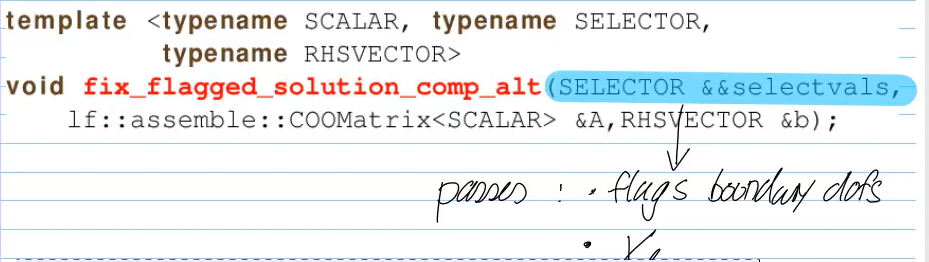
using LehrFM:
not copied code 2.7.6.17: Transformation function, which generates the block matrix from above
Problem:
Weak form:
- Boundary conditions: Dirichlet (essential)
// 1. Load Mesh and Setup DofHandler for Linear FE (1 DOF per node)
auto factory = std::make_unique<lf::mesh::hybrid2d::MeshFactory>(2);
lf::io::GmshReader readermove(factory), "mesh.msh";
auto mesh_p = reader.mesh();
lf::assemble::UniformFEDofHandler dofh(mesh_p, {{lf::base::RefEl::kPoint(), 1}});
// 2. Prepare Global System Containers (N x N)
lf::assemble::COOMatrix<double> A_triplets(dofh.NumDofs(), dofh.NumDofs());
Eigen::VectorXd rhs = Eigen::VectorXd::Zero(dofh.NumDofs());
// 3. Assemble Stiffness Matrix (using built-in Laplace Provider)
lf::uscalfe::LinearFELaplaceElementMatrix elmat_builder;
lf::assemble::AssembleMatrixLocally(0, dofh, dofh, elmat_builder, A_triplets);
// 4. Handle Dirichlet Boundary Conditions (Offset Function)
auto bd_flags = lf::mesh::utils::flagEntitiesOnBoundary(mesh_p, 2); // Flag nodes
auto selector = [&](unsigned int idx) -> std::pair<bool, double> {
auto node = dofh.Entity(idx);
return {bd_flags(*node), 0.0}; // Fix boundary nodes to 0.0
};
lf::assemble::FixFlaggedSolutionCompAlt(selector, A_triplets, rhs);
// 5. Solve
Eigen::SparseMatrix<double> A = A_triplets.makeSparse();
Eigen::SparseLU<Eigen::SparseMatrix<double>> solver(A);
if(solver.info() != Eigen::Success) abort();
Eigen::VectorXd solution = solver.solve(rhs);
- codim:
0->cells,1->edges,2->nodes COOMatrexavoids memory shifts during assemblyAssembleMatrixLocallyis templated -> works independent of test/trial space
Video 2.8 Parametric Finite Element Methods I (22 min)
remaining challenge: what to do with general mesh (curved edges, triangles + quadrilaterals)
Affine equivalence
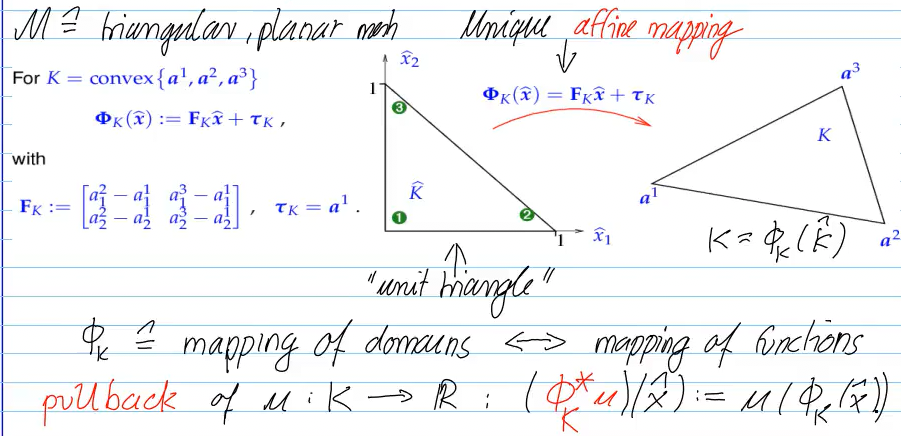
affine pullback preserves polynomials:
If
general quadrilateral lagrangian FE
- so far: GSF -> LSF #todo: look this up again
- now: start from LSF
on reference element -> inverse pullback:
-> gluing: GSF
bilinear transformation: componentwise (tensor product) polynomial
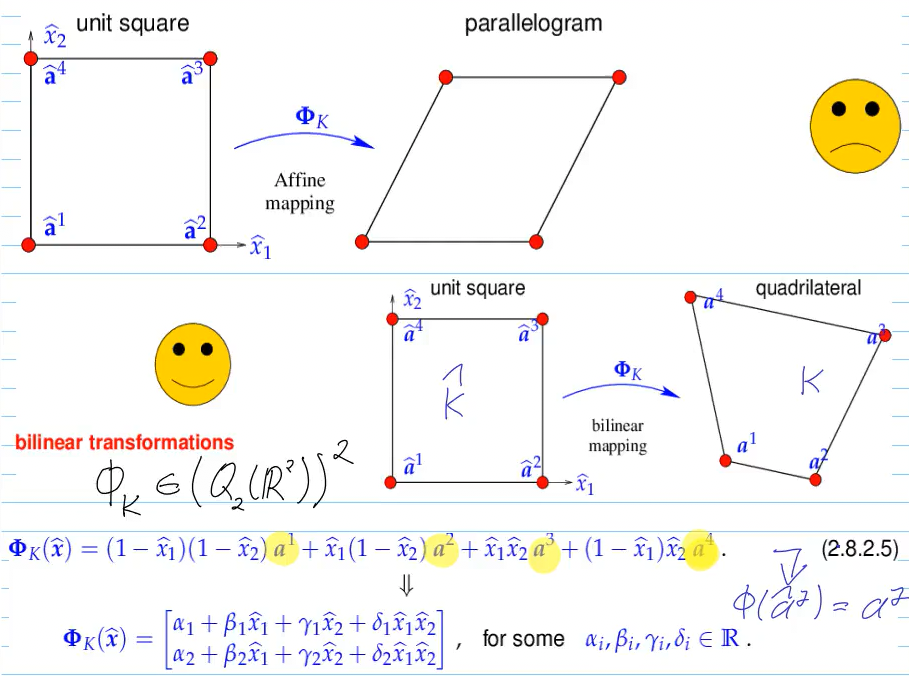
gluing:
-> local shape functions are no longer bilinear, since
The local shape functions
Video2.8 Parametric Finite Element Methods II (27 min)
Note that possibility of gluing needs to be checked!
#todo: what are we doing here?
[...]
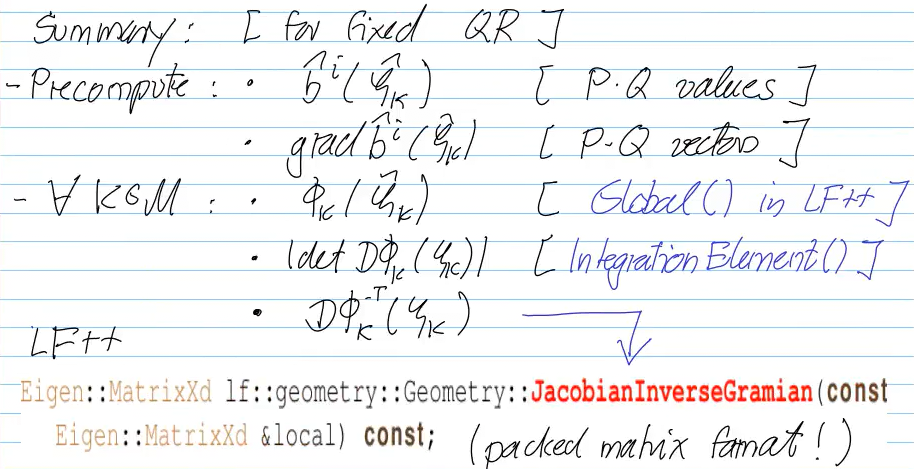
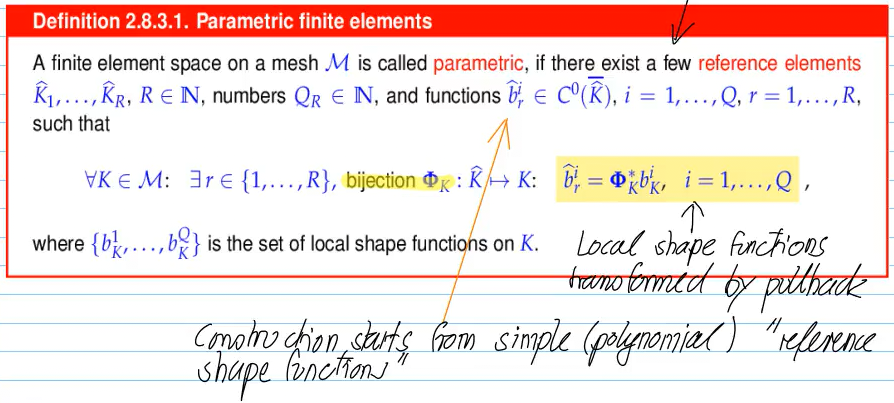
In order to define a
- a function realizing
, - and the evaluation
.
// interface in LF++:
size_type ScalarReferenceFiniteElement::NumRefShapeFunctions() const;
size_type ScalarReferenceFiniteElement::NumRefShapeFunctions(dim_t codim) const;
size_type ScalarReferenceFiniteElement::NumRefShapeFunctions(dim_t codim, sub_idx_t subidx) const;
Eigen::Matrix<SCALAR, Eigen::Dynamic, Eigen::Dynamic>
ScalarReferenceFiniteElement::EvalReferenceShapeFunctions(
const Eigen::MatrixXd& refcoords) const;
Eigen::Matrix<SCALAR, Eigen::Dynamic, Eigen::Dynamic>
ScalarReferenceFiniteElement::GradientsReferenceShapeFunctions(
const Eigen::MatrixXd& refcoords) const;
didn't copy code 2.8.3.29: Eval() method for parametric element matrix provider
Boundary Approximation by Parametric FEM:
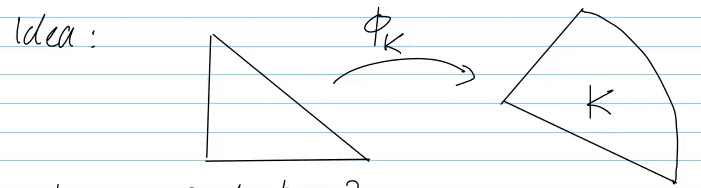
"6-node triangle" in LehrFEM++:
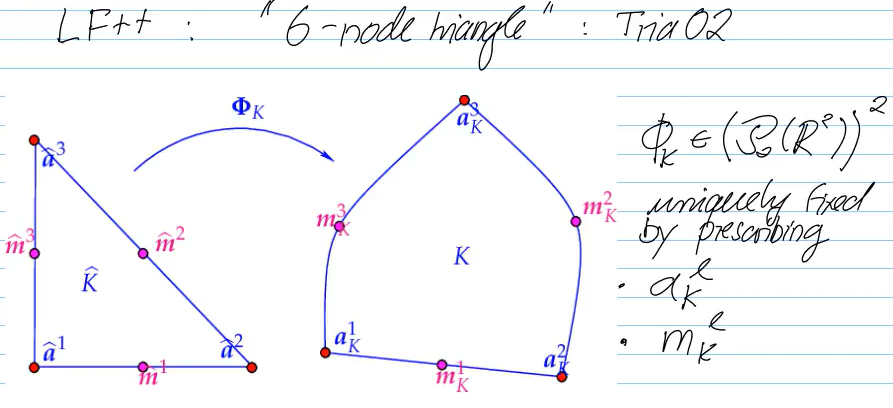
Question: why is this better than simply splitting the curve into multiple triangles? The approximation wouldn't be much worse than by this approach.
3. FEM: Convergence and Accuracy
Video 3.1 Abstract Galerkin Error Estimates (20 min)
convergence (how fast does
Discretization error
Bound relevant norm of discretization error
A relevant norm:
- LVP
(energy function)
Let
and let Ass. 3.1.1.2–Ass. 3.1.1.4 be satisfied. Then, with
galerkin orthogonality:
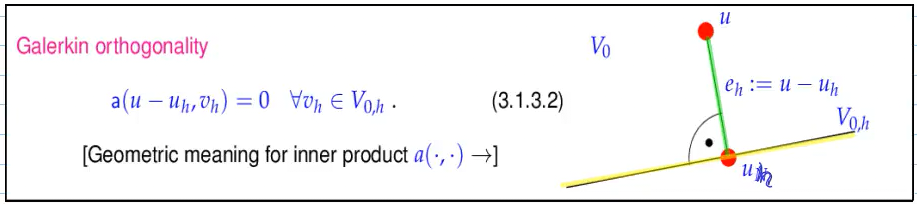
from this follows Pythagoras theorem:
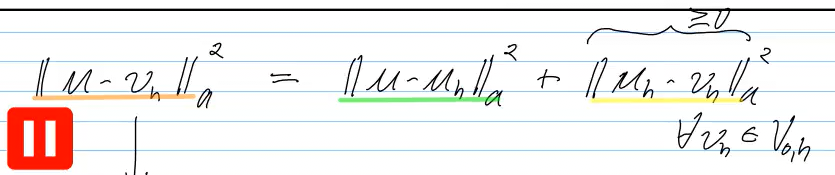
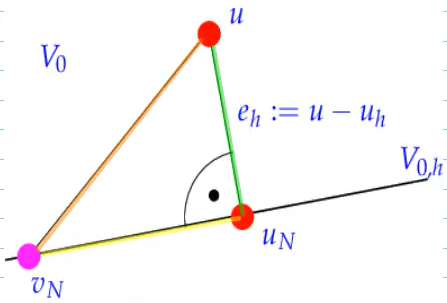
or shorter:
Under Ass. 3.1.1.2–Ass. 3.1.1.4 the energy norm of the Galerkin discretization error for (2.2.0.2) satisfies
-> Galerking solution is optimal (in energy)
- minimizes
over
-> As regards the energy norm, the Galerkin solution is the best possible solution we can obtain in a given trial space.
- Galerking error estimates in energy form approximation error estimates
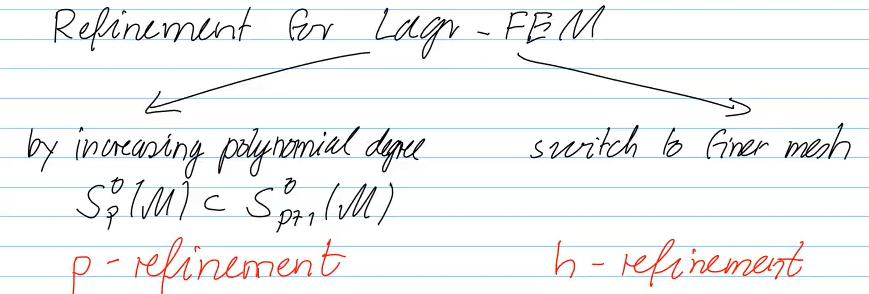
- we can improve the result by enlarging the space (refinement)
- 2d triangular: regular refinement by splitting triangle into 4 congruent triangles
- use
lf::refinementin LF++
Video 3.2 Empirical (Asymptotic) Convergence of Lagrangian FEM (26 min)
Asymptotic Convergence
Crucial: our notion of convergence is asymptotic!
sequence of discrete models
created by variation of a discretization parameter.
Given a mesh
- limit
-> 0 - for p-refinement, discretication DP
degree p
cost might depend on dimension
algebraic and exponential convergence
(asymptotically for
- log-log plot with straigt line: algebraic convergence
- lin-log plor with line: exponential convergence
-> (integral) error norms can usually be computed only by numerical quadrature (/sampling) of sufficiently high order
Example:
- alg. cvg., but slow convergence for non-smooth solutions (h-refinement)
cvg. seems to be faster than -cvg (?)
- exp. cvg.(p-refinement)
-> there might be pre-asymptotic behaviour (no convergence until mesh fine / polynomial degree high)
| Feature | h-Refinement | p-Refinement |
|---|---|---|
| Strategy | Subdivide mesh cells ( |
Increase local polynomial degree ( |
| Typical Convergence | Algebraic: |
Exponential: |
| Limiting Factor | Polynomial degree |
Smoothness |
| Space Property | Often results in nested spaces (e.g., via regular refinement) | Inherently leads to nested finite element spaces |
Video 3.3 A Priori (Asymptotic) Finite Element Error Estimates I (10 min)
Foundation: Cea's lemma
a suitable "candidate function"
Note: For 2nd-order elliptic Dirichlet BVP:
-> algebraic cvg., rate 1
-> algebraic cvg. rate 2
-> algebraic cvg. rate 2
Video 3.3 A Priori (Asymptotic) Finite Element Error Estimates II (18 min)
- interpolation errors in order to bound the energy norm of the discretization error for lagrangian FEM
- still looking for piecewise linear FE, but now in 2D
The linear interpolation operator
uniquely fixes element of piecweise FE space
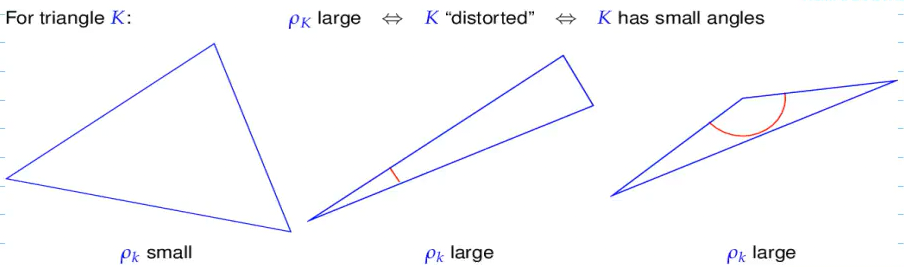
For a simplex
and the shape regularity measure of a simplicial mesh
is similarity-invariant (rotation, scaling, translation) - depends only on it's smallest angle
- expresses distortion compared to equilateral triangle
:
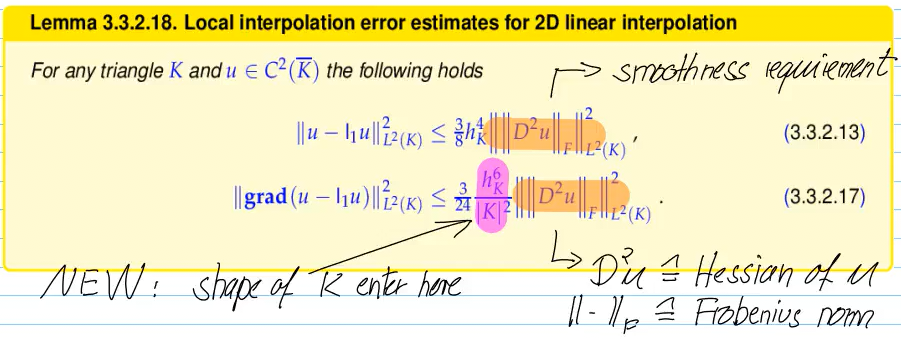
For any
-> alg. cvg. rate 2
-> alg. cvg. rate 1
where
#todo learn multi-index notation
The
Sobolev space
increasing regularity of functions
measures "ruggedness" of functions
The
rewriting error bounds using Sobolev norms, we get:
Under the assumptions/with notations of Thm. 3.3.2.21 (
Theorem answers:
"How many derivatives must a function have (in a weak, square-integrable sense) before we can guarantee it is actually a continuous, point-wise defined function?"
e.g.
Video 3.3 A Priori (Asymptotic) Finite Element Error Estimates III (16 min)
Let
- best approximation error
bounds for FE discretization error for 2nd-order elliptic BVPs (there: exact solution of BVP) in energy norm - "generic constant":
- actual value unknown
- dependence known
If we assume uniform shape-regularity and local quasi-uniformity of the mesh, then, from theorem 3.3.5.6 we get:
=> Algebraic convergence of discretization error with respect to N (DOFs), rate
- rate limited by
- polynomial degree
- smoothness
- polynomial degree
- rate deteriorates for larger
By what extra cost can we buy a certain improvement of the FEM solution? (3.3.5.23)
Assuming the a priori error estimate is sharp (the actual error follows the theoretical trend), the relationship between error reduction and computational cost is:
- The Goal (Gain): Reduce the discretization error (energy norm) by a factor of
. - The Price (Cost): Increase the number of unknowns (
) by a factor of: $$\text{Cost Factor} \approx \rho^{\frac{d}{\min{p, k-1}}}$$
- The Curse of Dimension (
): As the spatial dimension increases, the cost of reducing error grows exponentially. Accuracy is much "cheaper" in 1D than in 3D. - Optimal Efficiency (
): For best gain/cost, polynomial degree should match solution's smoothness ( ) - Smoothness Matters: For very smooth solutions (
is large), high-order elements ( ) reduce the required increase in significantly compared to linear elements ( ). - The "Slow" Limit: If the solution is not smooth (small
), increasing the polynomial degree does not help efficiency, because the cost factor will be stuck at regardless of how high you choose .
| type of refinement | alg. cvg. rate |
|---|---|
| h-refinement ( |
|
| h-refinement (low regularity of u: |
|
| p-refinement ( |
|
| p-refinement (perfectly smooth (analytic) solution) (because |
theorem doesn't work |
Here is a compressed summary of Unit 3.3 for your markdown callout, based on the course videos and documents:
- Cea's Lemma: energy norm of discretization
best approximation error of FE space - accuracy is governed by the mesh width (
), the polynomial degree ( ), and the Sobolev smoothness ( ) of the exact solution.
General
- Curse of Dimension: Convergence speed deteriorates as the spatial dimension
increases. - Rate Limits: The rate is limited by either the polynomial degree
(for smooth solutions) or the solution's lack of regularity (for rough solutions).
Asymptotic Efficiency (Cost-Benefit): Reducing the error by a factor
#todo Learn more about Sobolev regularity (solution
Video 3.4 Elliptic Regularity Theory (11 min)
WHat is the Sobolev regularity of solutions of elliptic BVP?
If
In addition, for such
probably irrelevant:
Let
Then
with regular part
=> reentrant corners lead to very poor regularity
however, for convex problems, the dirichlet solution is in
If
Video 3.5 Variational Crimes (15 min)
"theory is incredibly difficult"
Variational crime: instead of solving exact discrete variational problem, we solve a perturbed one:
-> inevitable, since some functions are only given in procedural form
Variational crimes must not affect (type and rate) of asymptotic convergence
- Impact of Numerical Quadrature
Note: To show that QR is of order 2 -> show that it integrates polybomials of order 1 exactly (n-1) -> integrates
Finite element theory tells us that the above guideline can be met, if the local numerical quadrature rule has sufficiently high order. The quantitative results can be condensed into the following rules of thumb:
| Target Accuracy | Required Quadrature Order |
|---|---|
| Order |
|
| Order |
Example of crime: Using midpoint rule (order 2) for quadratic elements (
- Impact of boundary approximation
If
for quadratic FEM, use quadratic boundary approximation (see chapter 2)
Example of crime: When
Video 3.8 Validation and Debugging of Finite Element Codes (13 min)
-> if code converges mroe slowly than theory predicts, there is almost certainly a bug
3 main methods:
- observing convergence between mesh levels
test code by comparing solutions on a sequence of nested meshes created by regular refinement
- refine mesh ->
should shrink - norm of the difference,
should display the same algebraic convergence rate ( ) as the actual discretization error - shortcut: compare the difference of their norms (
), should also converge at rate
- method of manufactured solutions
most popular way to test a solver
- Step 1: Pick a simple domain and a smooth analytic function
to be your "exact solution". - Step 2: Use the strong form of the PDE to symbolically calculate what the source function
and boundary data must be to produce that solution . - Step 3: Run your solver with this "manufactured"
and and measure the error using overkill quadrature. - Debugging: Plot the error on a log-log scale. If the slope (rate) is wrong, simplify the problem—for example, set the reaction coefficient
to zero to see if the bug is in the stiffness matrix or the mass matrix.
- Direct Testing of Bilinear Forms
test specific parts of your code, e.g. Galerkin matrix for a specific boundary term
- Pick a smooth function
and compute the value of the bilinear form analytically using a tool like Mathematica.
-> difference between the analytical value and the discrete value should converge at the polynomial degree rateas the mesh is refined.
- Avoid polynomial solution: polynomial as manufactured solution will have 0 error -> no convergence rate
- Smothness matters: singularities in the solution can "foil" the fast convergence you expect to see
6. Second-Order Linear Evolution Problems
Video 9.2.1 Heat Equation (10 min)
- linear evolution: time-dependent / transient
- posed on space-time cylinder
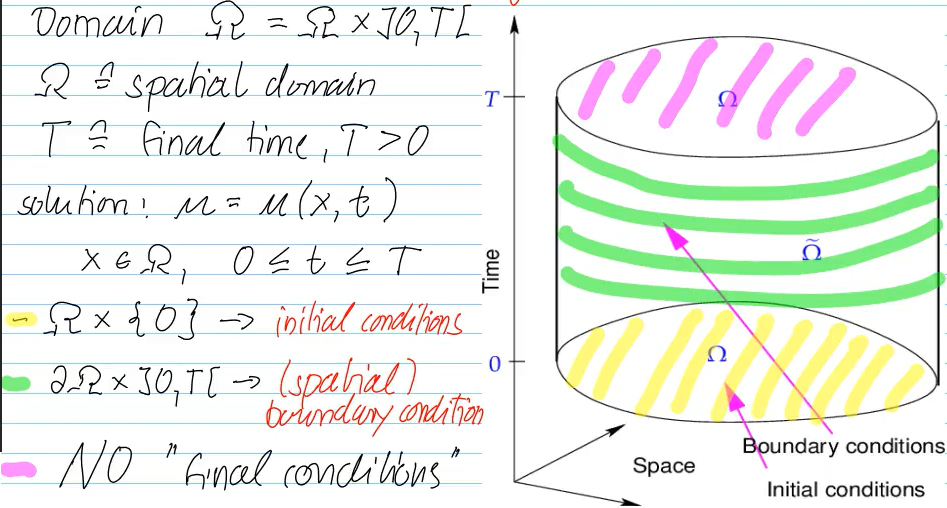
6.2 Parabolic Initial-Boundary Value Problems
balance law:
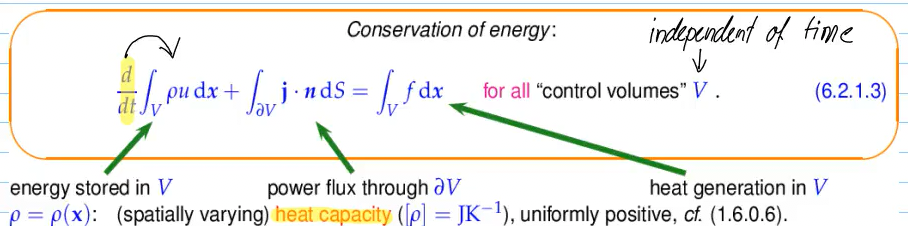
using localization and fourier law, we get:
spatial b.c.:
(although the boundary conditions are now dependent from x and t)
initial conditions (temporal b.c.):
combined:
Video 9.2.2 Heat Equation: Spatial Variational Formulation (8 min)
Spatial variational form of (7.1.1.5)–(7.1.1.7): seek
abstract linear evolution problem:
- a, m are independent of time and s.p.d
- solution will depend linearly on f,
Video 9.2.3 Stability of Parabolic Evaolution Problems (10 min)
reminder: Poincare-Friedrichs inequality:
For
where
Exponential decay of energy during parabolic evolution without excitation ("Parabolic evolutions dissipate energy")
Video 9.2.4 Spatial Semi-Discretization: Method of Lines (6 min)
-> spatial Galerkin discretization of 6.2.2.8 yields:
Combining (7.1.4.1) and (7.1.4.2) we obtain
with
- s.p.d. stiffness matrix
, (independent of time), - s.p.d. mass matrix
, (independent of time), - source (load) vector
, (time-dependent), coefficient vector of a projection of onto .
(7.1.4.4) is an ordinary differential equation (ODE) for
- but only semi-discretization, since
is still function of continuous time
=> MOL-ODE is semi-discrete
Video 9.2.7 Timestepping for Method-of-Lines ODE (30 min)
since s.p.d., can be invertedy -> use Cholesky-decomposition ( #todo what is that?)
Explicit Euler timestepping is not stable (exponential blow-up) in case of large timestep combined with fine mesh.
Let
where the "generic constants" (
-> timestep constraint:
diagonalization of RK-SSM (
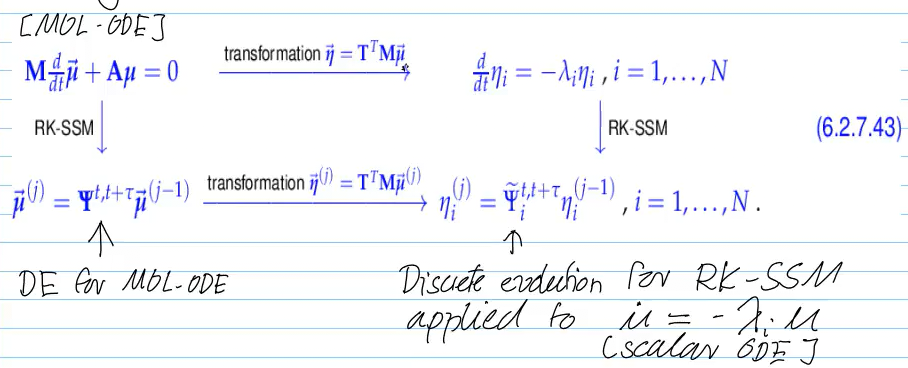
Necessary condition for
The discrete evolution
RK-SSM for
RK-SSM is unconditionally stable for MOL-ODE if
- evne desirable
for
A Runge-Kutta single-step method satisfying (7.1.7.45) is called
for all , and - "
" .
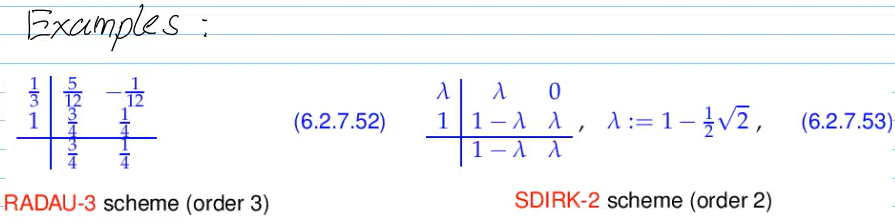
necessarily implicit
Video 9.2.8 Fully Discrete Method of Lines: Convergence (18 min)
- Heat Equation (Strong Form): transient heat equation on a space-time cylinder
, subject to initial and boundary conditions: - Spatial Variational Formulation: By treating time
as a passive parameter and applying integration by parts in the spatial domain, the PDE is converted to a weak form:
- Abstract Formulation: The weak form is generalized into an abstract parabolic evolution problem using the mass bilinear form
and the stiffness bilinear form :
- Method of Lines ODE: Applying Galerkin discretization in space (e.g., using finite elements) transforms the abstract evolution into a system of ordinary differential equations for the coefficient vector
:
where
5. Runge-Kutta Method (Full Discretization): Finally, the semi-discrete ODE is integrated in time using a single-step method (SSM). For parabolic problems, L-stable Runge-Kutta methods (such as Radau methods) are preferred to ensure stability:
resulting in a fully discrete scheme where the total error is the combined effect of spatial and temporal discretization.
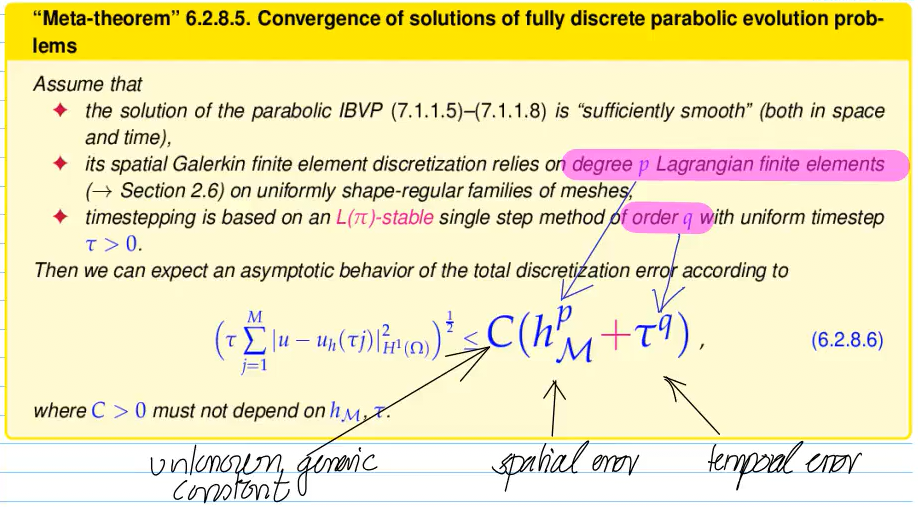
Guideline: spatial and temporal resolution have to be adjusted in tandem
for a conditionally stable explicit method, we often have timestep constraint
-> if we reduce mesh for accuracy, we have to reduce the timestep more severly than accuarcy requires -> inefficiency "overkill constraint"
-> use unconditionally stable implicit methods instead
We're converting image into markdown + latex formulas. For normal text, normal markdown. For boxes, use callouts. The format of callouts is the following:
> [!name] <title>
> content
Note that there is no empty line between the callout header and the content!
- orange boxes: convert to !intermediate
- lemmas, theorems (yellow): convert to !lemma, !theorem
- definitions (red): convert to !definition
Highlighted text can be highlighted in markdown, too: =highlight. This is not standard commonmark, but if you see highlighted text in the image, highlight it when converting, too. Same for bold: if a text is emphasised, make it bold.
-> Note that hihglighting can only be used for markdown, not for latex
-> If something cannot be converted to pure markdown, warn me instead of attempting to use non-standard syntax.
-> For this task, you may omit any custom formats specified earlier.
-> Your answer should consist solely of the markdown (and the warning if something cannot be converted). No follow-up suggestions, questions, clarifications.
-> for colors in latex, use \textcolor{color}{content} instead of \color{color}{content}